#include <map_averaging.h>
Inheritance diagram for MapAveragingModule:
Collaboration diagram for MapAveragingModule:
Public Member Functions | |
| void | onConfigurationChange (engine_configuration_s const *previousConfig) override |
| void | onFastCallback () override |
| void | onEnginePhase (float, efitick_t edgeTimestamp, float currentPhase, float nextPhase) override |
| void | triggerCallback (uint32_t index, efitick_t edgeTimestamp) |
| void | init () |
| void | submitSample (float voltsMap1, float voltsMap2) |
 Public Member Functions inherited from EngineModule Public Member Functions inherited from EngineModule | |
| virtual void | initNoConfiguration () |
| virtual void | setDefaultConfiguration () |
| virtual void | onSlowCallback () |
| virtual void | onEngineStop () |
| virtual void | onIgnitionStateChanged (bool) |
| virtual bool | needsDelayedShutoff () |
Data Fields | |
| mapSampler | samplers [MAX_CYLINDER_COUNT] |
Detailed Description
Definition at line 67 of file map_averaging.h.
Member Function Documentation
◆ init()
| void MapAveragingModule::init | ( | ) |
Definition at line 235 of file map_averaging.cpp.
235 {
236 for (size_t cylinderIndex = 0; cylinderIndex < MAX_CYLINDER_COUNT; cylinderIndex++) {
238 }
239
241 efiPrintf("initMapAveraging...");
242 applyMapMinBufferLength();
243 } else {
244 efiPrintf("Running without MapAveraging...");
245 }
246}
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
bool isMapAveragingEnabled
Here is the call graph for this function:

◆ onConfigurationChange()
|
overridevirtual |
Reimplemented from EngineModule.
Definition at line 229 of file map_averaging.cpp.
229 {
230 if (!previousConfig || engineConfiguration->mapMinBufferLength != previousConfig->mapMinBufferLength) {
231 applyMapMinBufferLength();
232 }
233}
int mapMinBufferLength
Here is the call graph for this function:

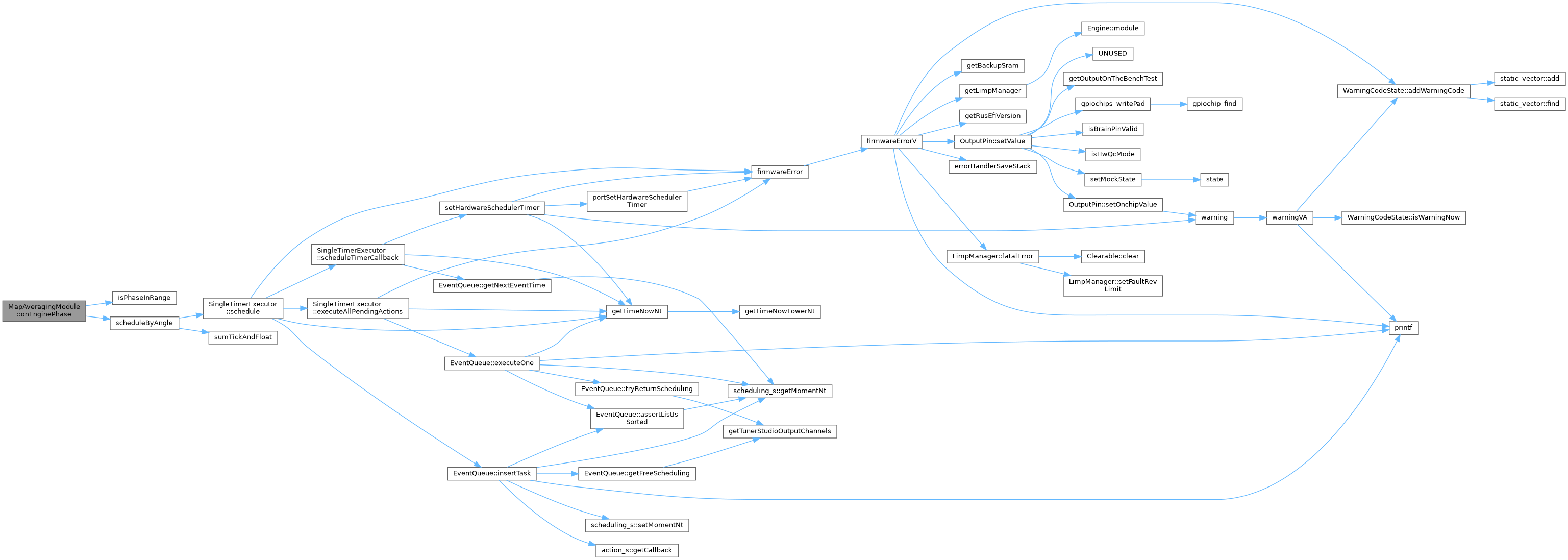
◆ onEnginePhase()
|
overridevirtual |
Reimplemented from EngineModule.
Definition at line 199 of file map_averaging.cpp.
202 {
204 return;
205 }
206
208
209 int samplingCount = engineConfiguration->measureMapOnlyInOneCylinder ? 1 : engineConfiguration->cylindersCount;
210
211 for (int i = 0; i < samplingCount; i++) {
213
215 continue;
216 }
217
218 float angleOffset = samplingStart - currentPhase;
219 if (angleOffset < 0) {
221 }
222
224
225 scheduleByAngle(&s.timer, edgeTimestamp, angleOffset, action_s::make<startAveraging>(&s));
226 }
227}
angle_t mapAveragingStart[MAX_CYLINDER_COUNT]
Definition engine_state.h:47
Definition perf_trace.h:109
@ MapAveragingTriggerCallback
efitick_t scheduleByAngle(scheduling_s *timer, efitick_t nowNt, angle_t angle, action_s const &action)
Definition rpm_calculator.cpp:389
uint32_t cylindersCount
bool measureMapOnlyInOneCylinder
Here is the call graph for this function:
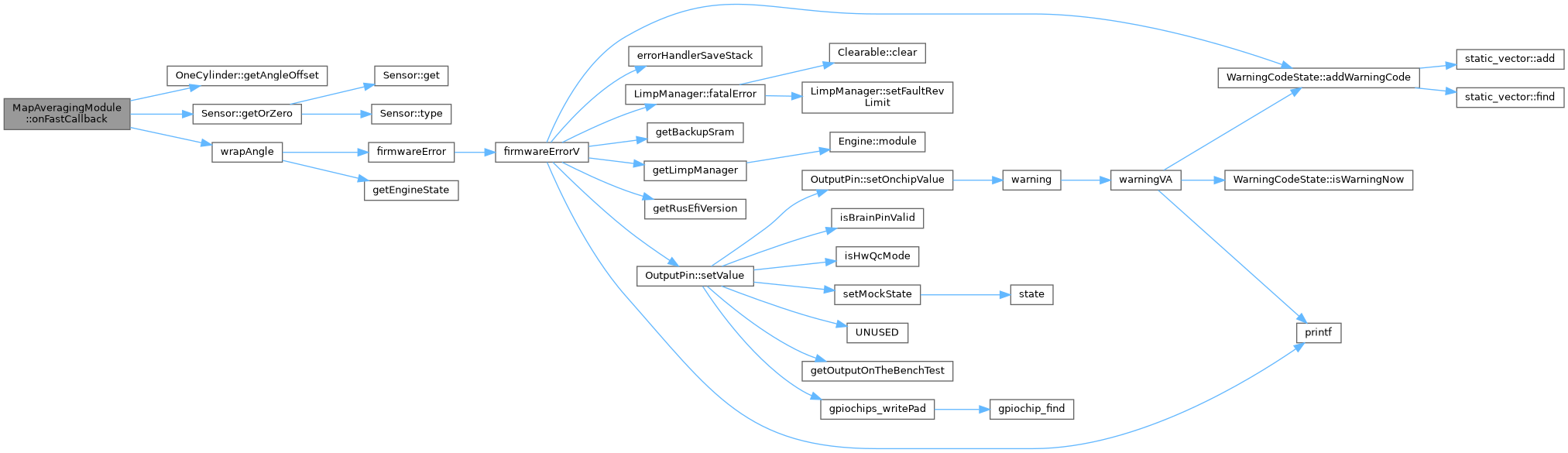
◆ onFastCallback()
|
overridevirtual |
Reimplemented from EngineModule.
Definition at line 178 of file map_averaging.cpp.
178 {
183
188 }
189
192
193 // Clamp the duration to slightly less than one cylinder period
196}
@ CUSTOM_ERR_6562
@ CUSTOM_ERR_MAP_START_ASSERT
@ CUSTOM_ERR_6563
@ Rpm
float samplingAngle[MAP_ANGLE_SIZE]
float samplingWindow[MAP_WINDOW_SIZE]
float samplingWindowBins[MAP_WINDOW_SIZE]
float samplingAngleBins[MAP_ANGLE_SIZE]
MAP_sensor_config_s map
void wrapAngle(angle_t &angle, const char *msg, ObdCode code)
Definition trigger_structure.cpp:43
Here is the call graph for this function:
◆ submitSample()
◆ triggerCallback()
| void MapAveragingModule::triggerCallback | ( | uint32_t | index, |
| efitick_t | edgeTimestamp | ||
| ) |
Field Documentation
◆ samplers
| mapSampler MapAveragingModule::samplers[MAX_CYLINDER_COUNT] |
Definition at line 77 of file map_averaging.h.
Referenced by init(), and onEnginePhase().
The documentation for this class was generated from the following files:
- controllers/modules/map_averaging/map_averaging.h
- controllers/modules/map_averaging/map_averaging.cpp