Detailed Description
Board initialization file.
Definition in file board.c.
Functions | |
| void | delay (void) |
| void | __blink (int n) |
| void | disableWatchdog (void) |
| void | __early_init (void) |
| void | __late_init (void) |
| void | boardInit (void) |
| Board-specific initialization code. | |
Function Documentation
◆ __blink()
| void __blink | ( | int | n | ) |
Definition at line 23 of file board.c.
23 {
24#if 1
25 PCC->CLKCFG[PCC_PORTD_INDEX] |= PCC_CLKCFG_CGC_MASK; // enable clock on PORT D
26 PORTD->PCR[7U] = (PORTD->PCR[7U] & ~PORT_PCR_MUX_MASK) | PORT_PCR_MUX(1/*kPORT_MuxAsGpio*/);
27 GPIOD->PSOR = 1U << 7U;
28 GPIOD->PDDR |= (1U << 7U);
29 int k;
30 for (k = 0; k < 1; k++) {
31 GPIOD->PCOR = 1U << 7U;
32 for (int i = 0; i < 2*n; i++)
33 {
34 GPIOD->PTOR = (1U << 7U);
35 delay();
36 }
37 GPIOD->PSOR = 1U << 7U;
38
39 for (int kk = 0; kk < 8; kk++) {
40 delay();
41 }
42 }
43/*
44 for (k = 0; k < 10; k++) {
45 delay();
46 }
47*/
48#endif
49}
Here is the call graph for this function:

◆ __early_init()
| void __early_init | ( | void | ) |
Definition at line 57 of file board.c.
Here is the call graph for this function:

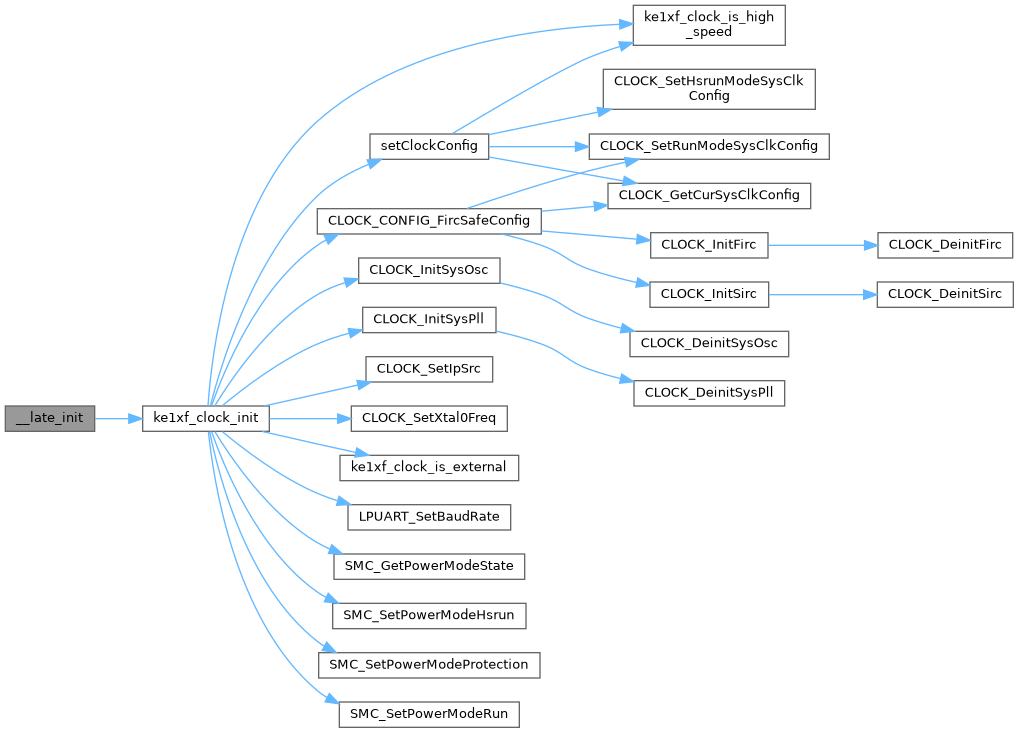
◆ __late_init()
| void __late_init | ( | void | ) |
Definition at line 61 of file board.c.
61 {
62 // we need static variables to be already initialized
63 // to configure the clock properly and save its state
64 ke1xf_clock_init(KINETIS_DEFAULT_CLK);
65}
void ke1xf_clock_init(kinetis_clock_type_e ct)
This function executes the configuration of clocks.
Definition clock_config.c:168
Here is the call graph for this function:
◆ boardInit()
| void boardInit | ( | void | ) |
◆ delay()
| void delay | ( | void | ) |
◆ disableWatchdog()
| void disableWatchdog | ( | void | ) |