Detailed Description
See also map_averaging.cpp
Definition in file map.cpp.
Functions | |
| static float | validateBaroMap (float mapKPa) |
| static void | printMAPInfo () |
| void | initMapDecoder () |
Function Documentation
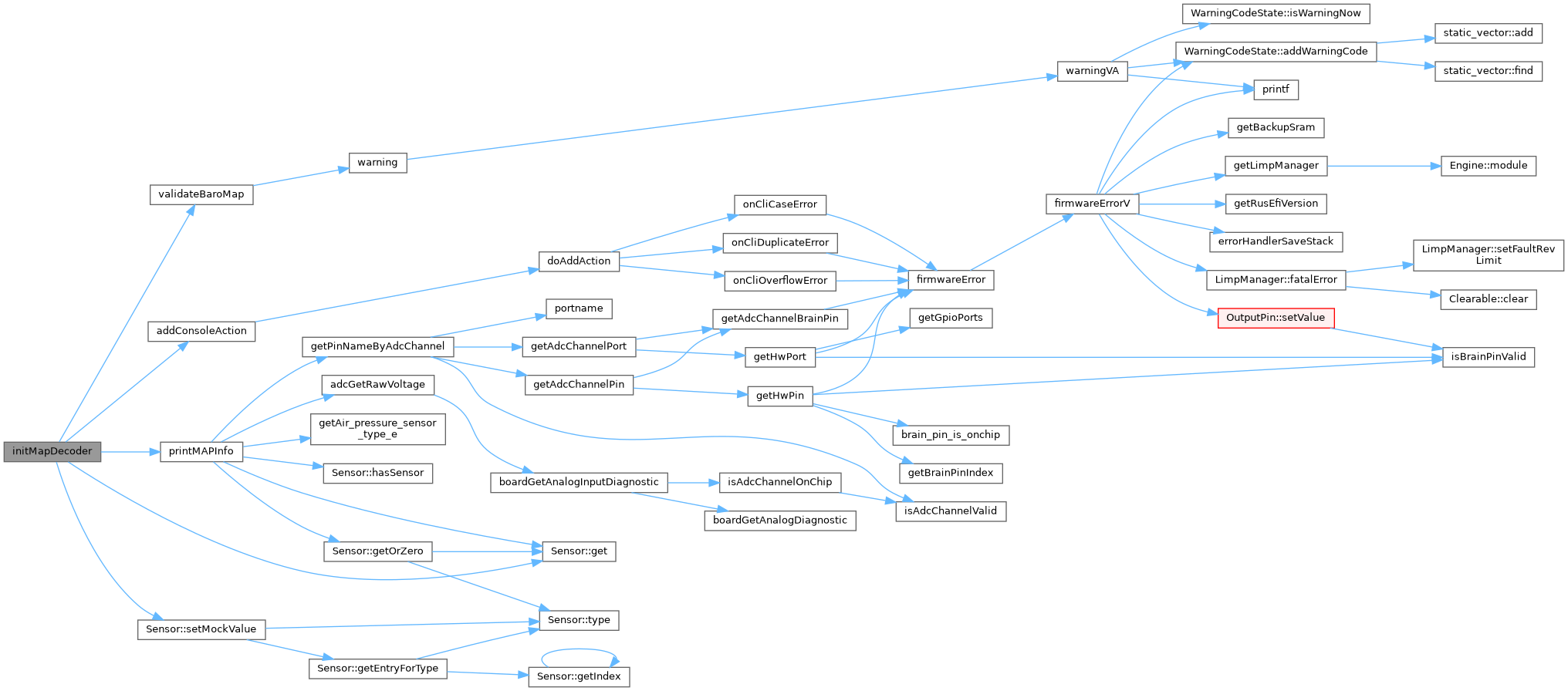
◆ initMapDecoder()
| void initMapDecoder | ( | ) |
Definition at line 66 of file map.cpp.
66 {
68 // Read initial MAP sensor value and store it for Baro correction.
70 efiPrintf("Get initial baro MAP pressure = %.2fkPa", storedInitialBaroPressure);
71 // validate if it's within a reasonable range (the engine should not be spinning etc.)
72 storedInitialBaroPressure = validateBaroMap(storedInitialBaroPressure);
73 if (!std::isnan(storedInitialBaroPressure)) {
74 efiPrintf("Using this fixed MAP pressure to override the baro correction!");
75
76 // TODO: do literally anything other than this
78 } else {
79 efiPrintf("The baro pressure is invalid. The fixed baro correction will be disabled!");
80 }
81 }
82
83#if EFI_PROD_CODE
85#endif
86}
static void setMockValue(SensorType type, float value, bool mockRedundant=false)
Definition sensor.cpp:215
virtual SensorResult get() const =0
void addConsoleAction(const char *token, Void callback)
Register console action without parameters.
Definition cli_registry.cpp:91
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
@ MapSlow
@ BarometricPressure
bool useFixedBaroCorrFromMap
Referenced by initSensors().
Here is the call graph for this function:
Here is the caller graph for this function:

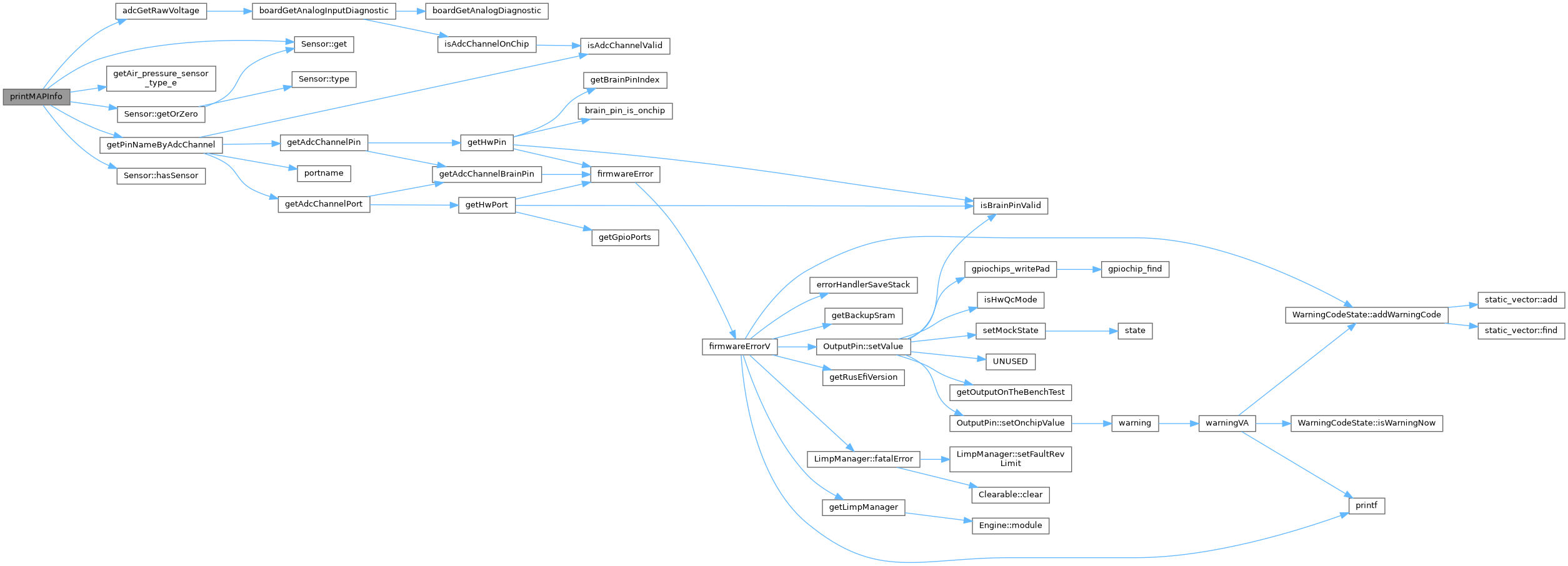
◆ printMAPInfo()
|
static |
Definition at line 28 of file map.cpp.
28 {
29#if EFI_ANALOG_SENSORS
31
32#if EFI_MAP_AVERAGING && defined (MODULE_MAP_AVERAGING)
36#endif // EFI_MAP_AVERAGING
37
39 char pinNameBuffer[16];
40
41 efiPrintf("MAP %.2fv @%s",
45 efiPrintf("at %.2fv=%.2f at %.2fv=%.2f",
50 }
51
53 efiPrintf("baro type=%d value=%.2f", engineConfiguration->baroSensor.type, Sensor::get(SensorType::BarometricPressure).value_or(-1));
55 efiPrintf("min=%.2f@%.2f max=%.2f@%.2f",
60 }
61 }
62#endif /* EFI_ANALOG_SENSORS */
63}
expected< float > adcGetRawVoltage(const char *msg, adc_channel_e hwChannel)
Definition adc_inputs.cpp:78
const char * getAir_pressure_sensor_type_e(air_pressure_sensor_type_e value)
Definition auto_generated_commonenum.cpp:244
char * getPinNameByAdcChannel(const char *msg, adc_channel_e hwChannel, char *buffer, size_t bufferSize)
Definition engine_controller.cpp:212
@ Map
air_pressure_sensor_config_s sensor
float lowValue
float highValue
air_pressure_sensor_type_e type
adc_channel_e hwChannel
float mapHighValueVoltage
MAP_sensor_config_s map
air_pressure_sensor_config_s baroSensor
float mapLowValueVoltage
Referenced by initMapDecoder().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ validateBaroMap()
This function checks if Baro/MAP sensor value is inside of expected range
- Returns
- unchanged mapKPa parameter or NaN
Definition at line 16 of file map.cpp.
16 {
17 // Highest interstate is the Eisenhower Tunnel at 11158 feet -> 66 kpa
18 // Lowest point is the Dead Sea, -1411 feet -> 106 kpa
19 if (std::isnan(mapKPa) || mapKPa > 110 || mapKPa < 60) {
21 return NAN;
22 }
23 return mapKPa;
24}
@ OBD_Barometric_Press_Circ
Referenced by initMapDecoder().
Here is the call graph for this function:

Here is the caller graph for this function:
