Functions | |
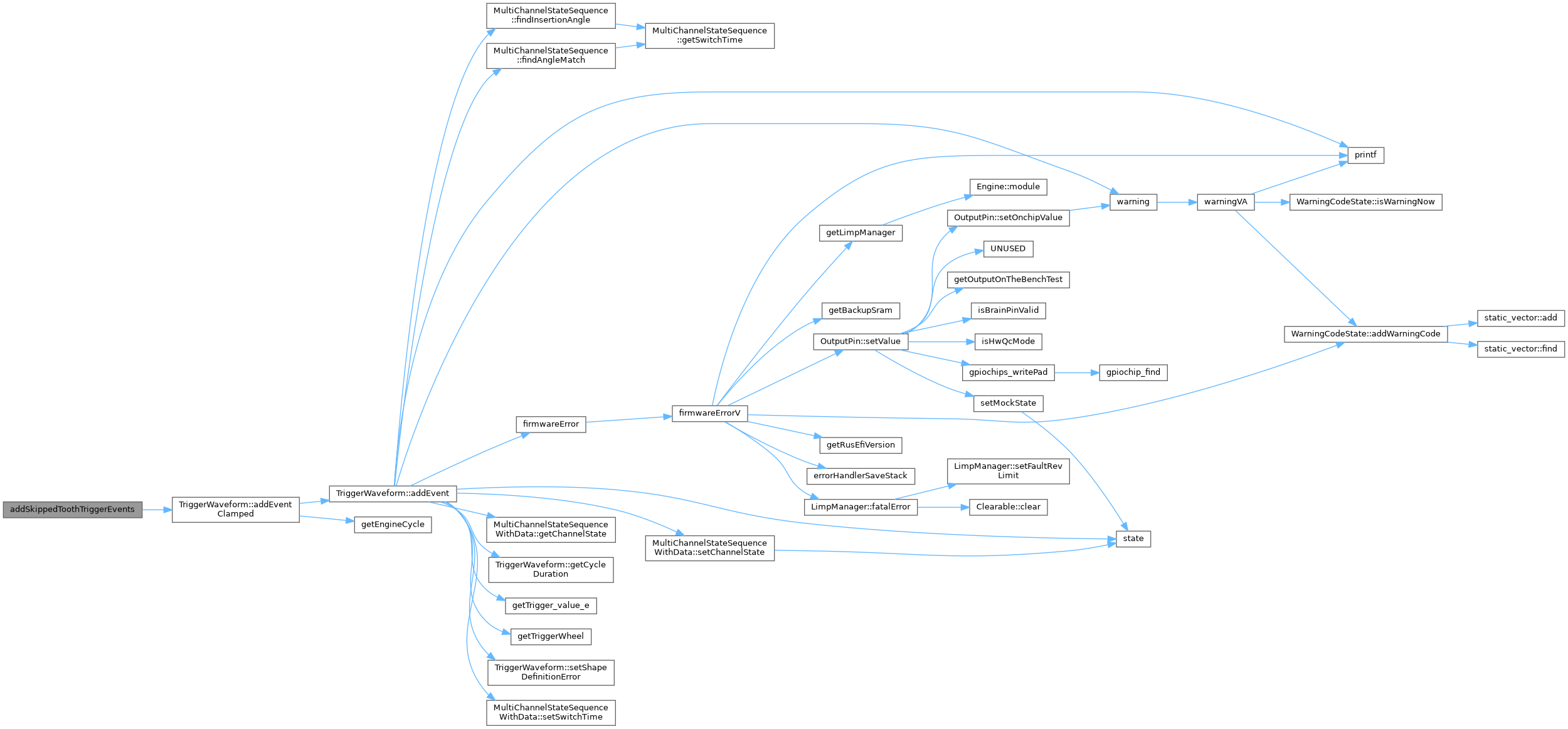
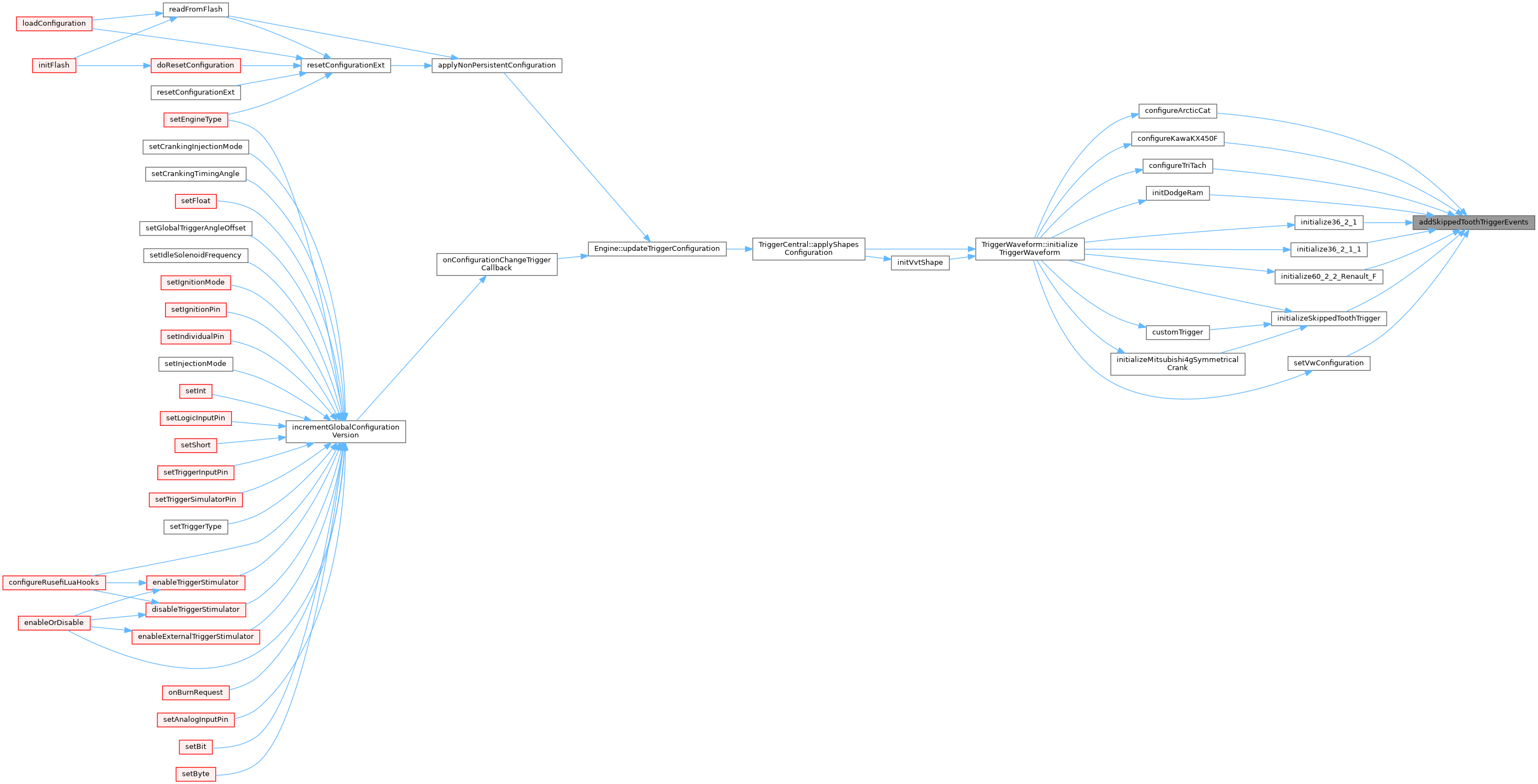
| void | addSkippedToothTriggerEvents (TriggerWheel wheel, TriggerWaveform *s, int totalTeethCount, int skippedCount, float toothWidth, float offset, float engineCycle, float filterLeft, float filterRight) |
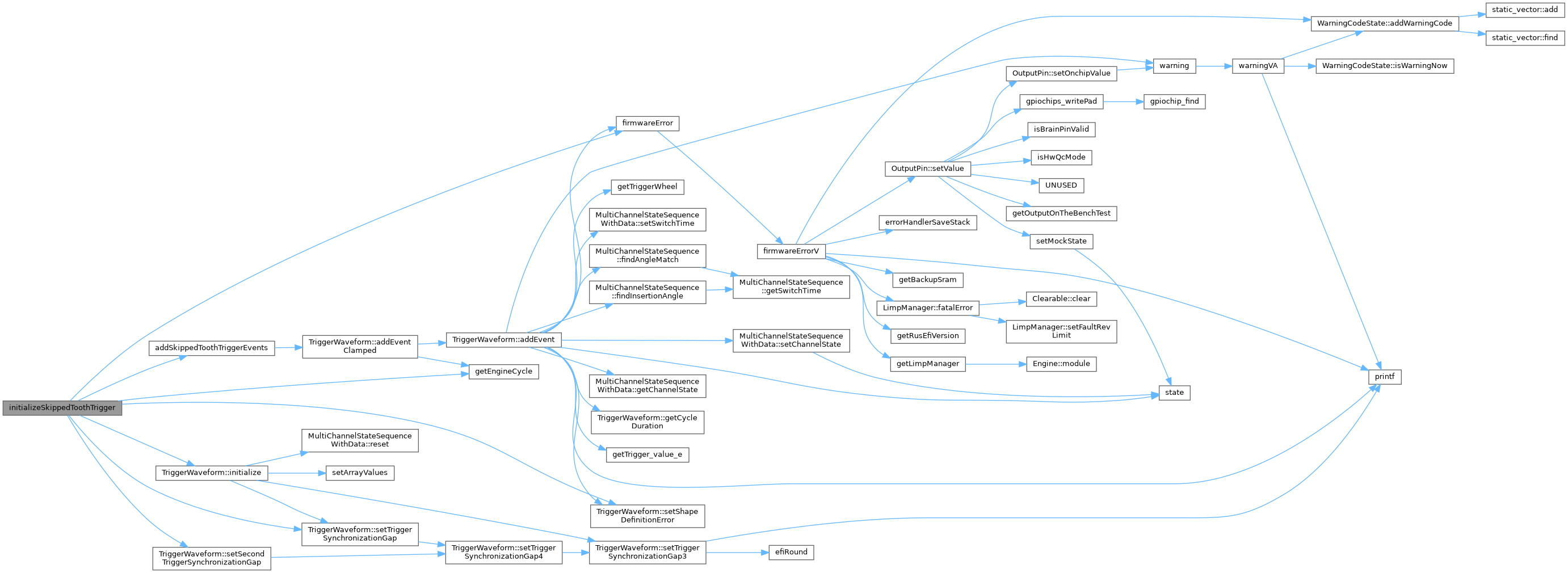
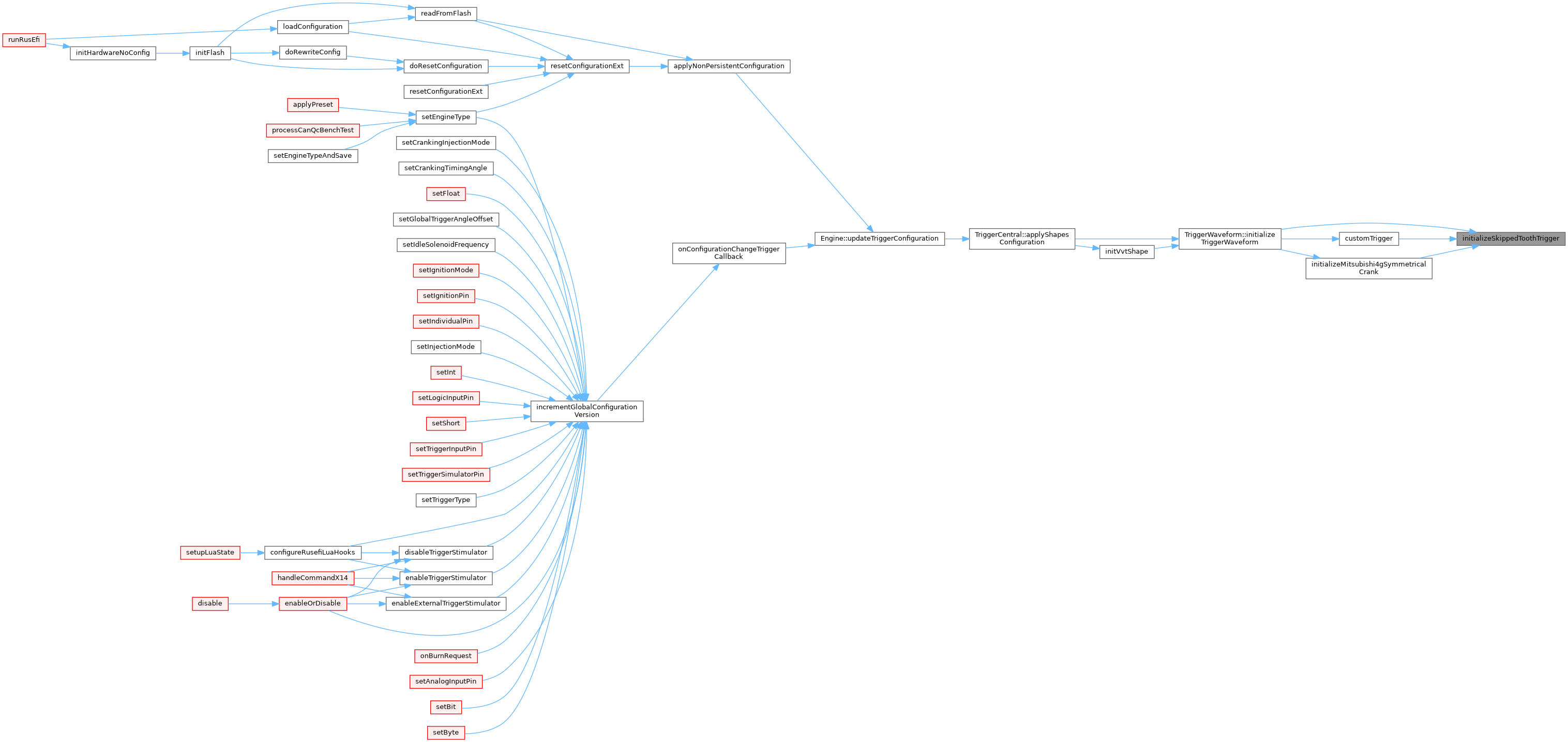
| void | initializeSkippedToothTrigger (TriggerWaveform *s, int totalTeethCount, int skippedCount, operation_mode_e operationMode, SyncEdge syncEdge) |
| void | configure3_1_cam (TriggerWaveform *s) |
| void | configureOnePlusOne (TriggerWaveform *s) |
| void | configureQuickStartSenderWheel (TriggerWaveform *s) |
| void | configureKawaKX450F (TriggerWaveform *s) |
| void | configure3ToothCrank (TriggerWaveform *) |
| void | configure6ToothCrank (TriggerWaveform *) |
| void | configure12ToothCrank (TriggerWaveform *) |
Function Documentation
◆ addSkippedToothTriggerEvents()
| void addSkippedToothTriggerEvents | ( | TriggerWheel | wheel, |
| TriggerWaveform * | s, | ||
| int | totalTeethCount, | ||
| int | skippedCount, | ||
| float | toothWidthPercentage, | ||
| float | offset, | ||
| float | engineCycle, | ||
| float | filterLeft, | ||
| float | filterRight | ||
| ) |
last fall aligned at 720 and skipped area is right before 720
Definition at line 22 of file trigger_universal.cpp.
Referenced by configureArcticCat(), configureKawaKX450F(), configureTriTach(), initDodgeRam(), initialize36_2_1(), initialize36_2_1_1(), initialize60_2_2_Renault_F(), initializeSkippedToothTrigger(), and setVwConfiguration().
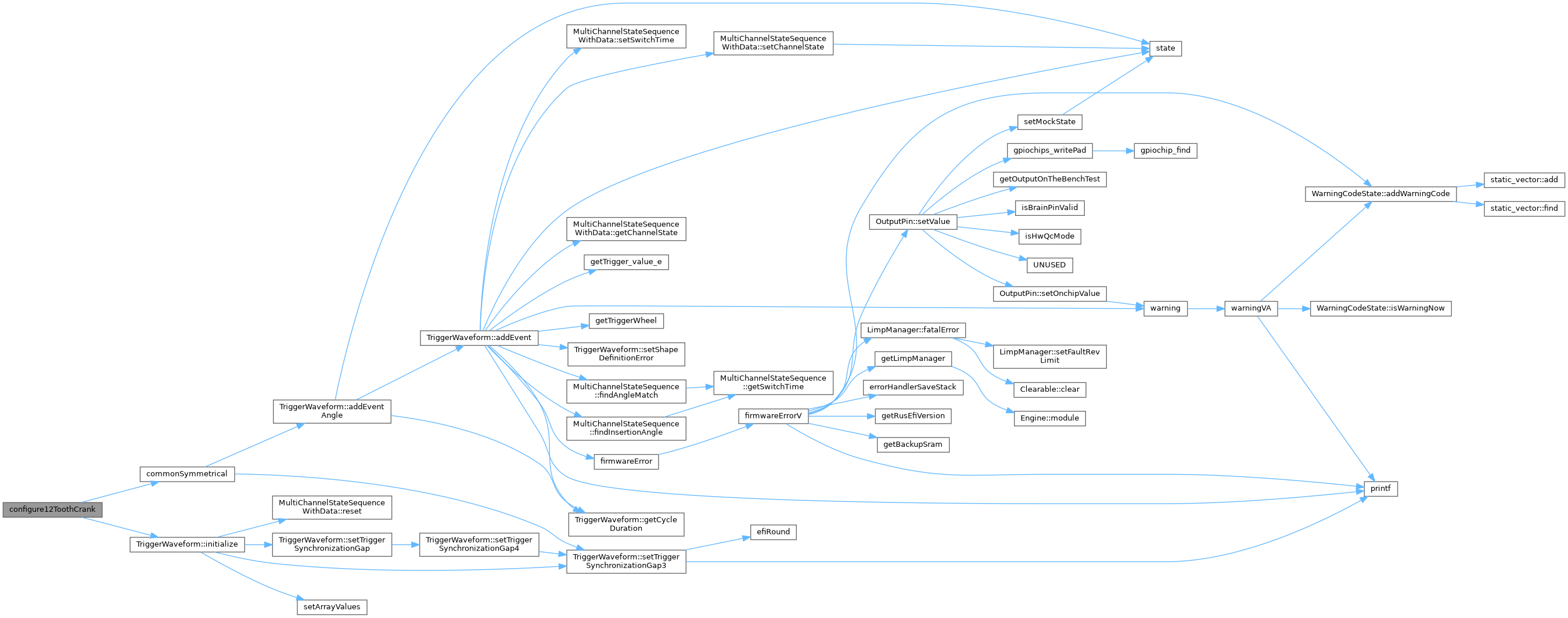
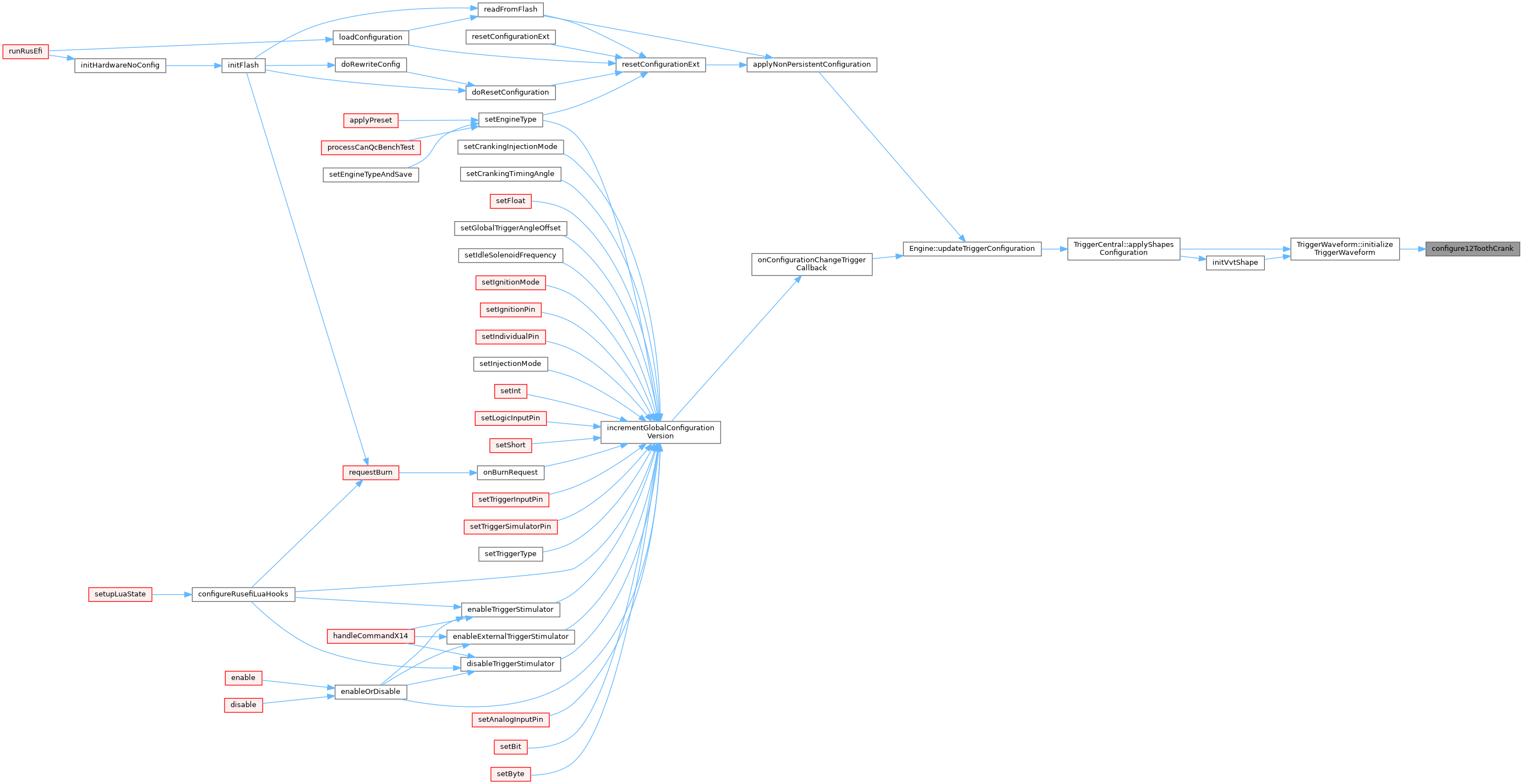
◆ configure12ToothCrank()
| void configure12ToothCrank | ( | TriggerWaveform * | s | ) |
Definition at line 175 of file trigger_universal.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
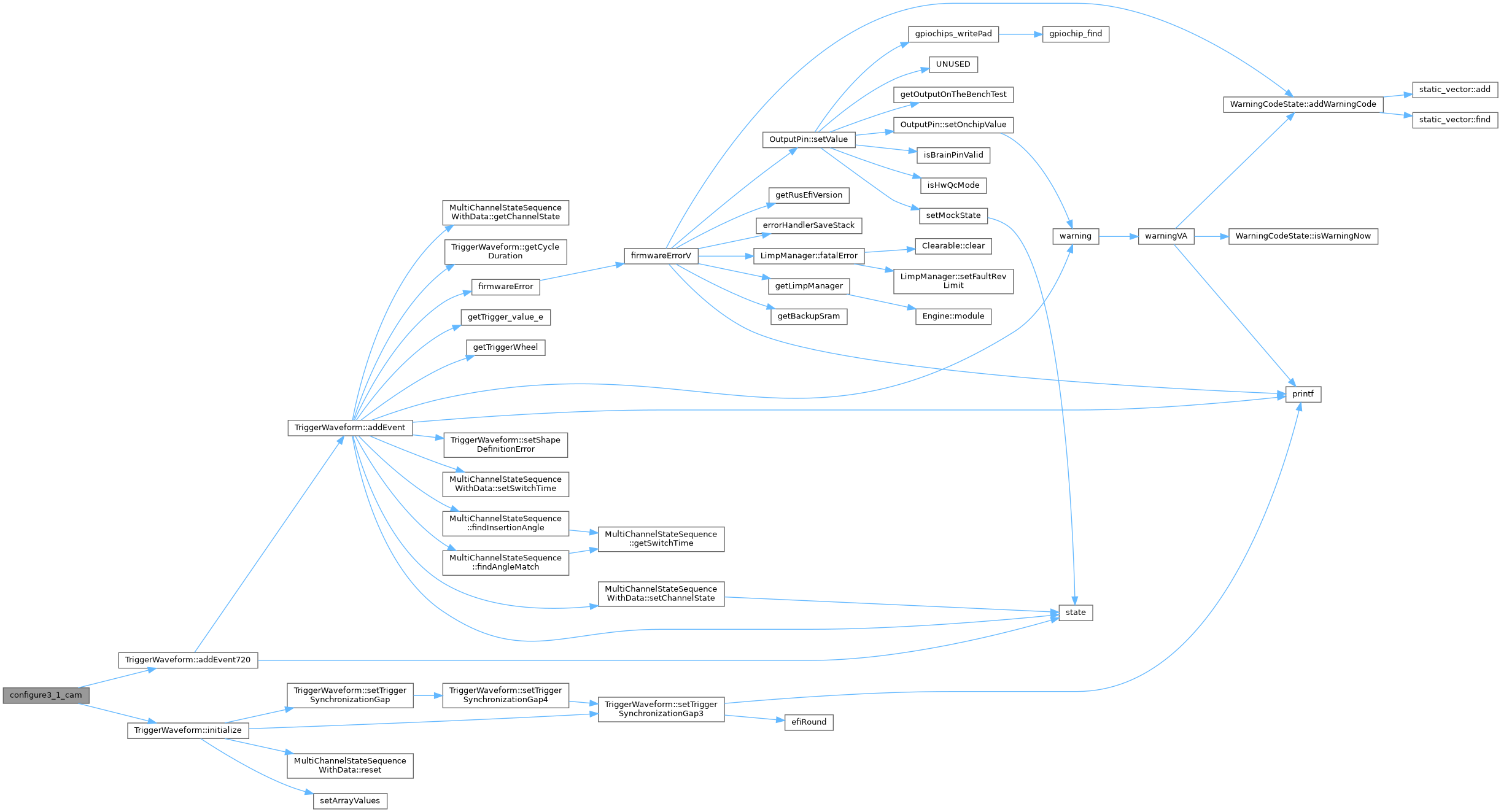
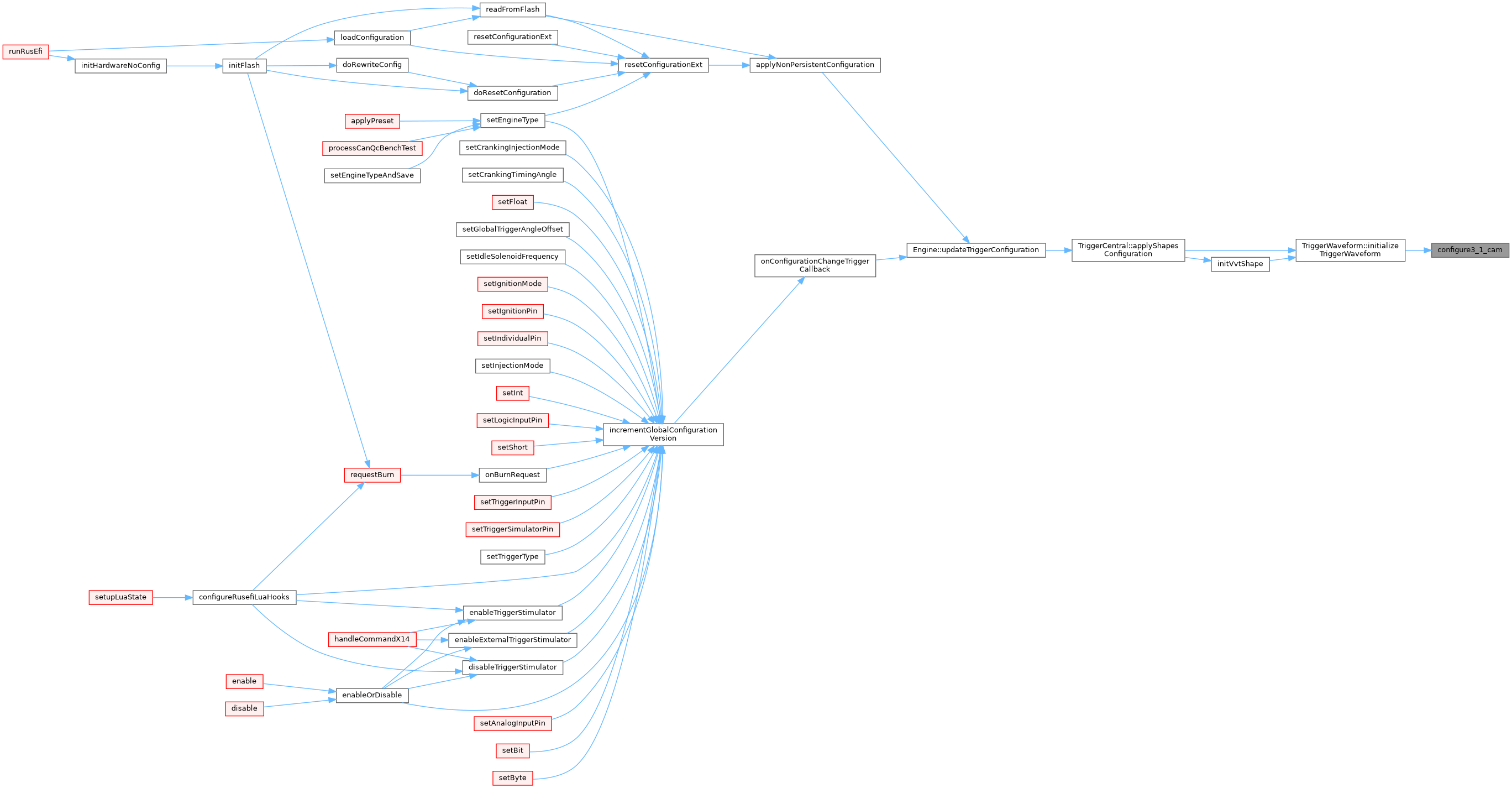
◆ configure3_1_cam()
| void configure3_1_cam | ( | TriggerWaveform * | s | ) |
Definition at line 84 of file trigger_universal.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
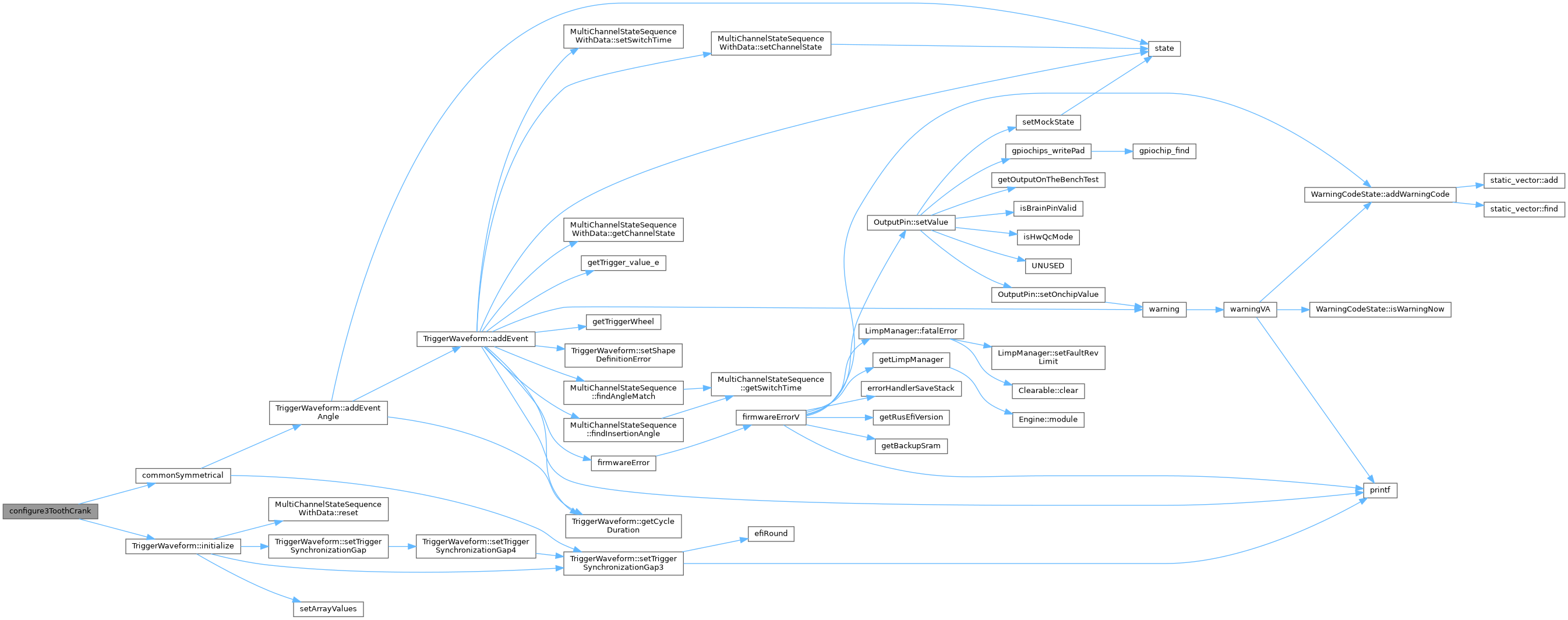
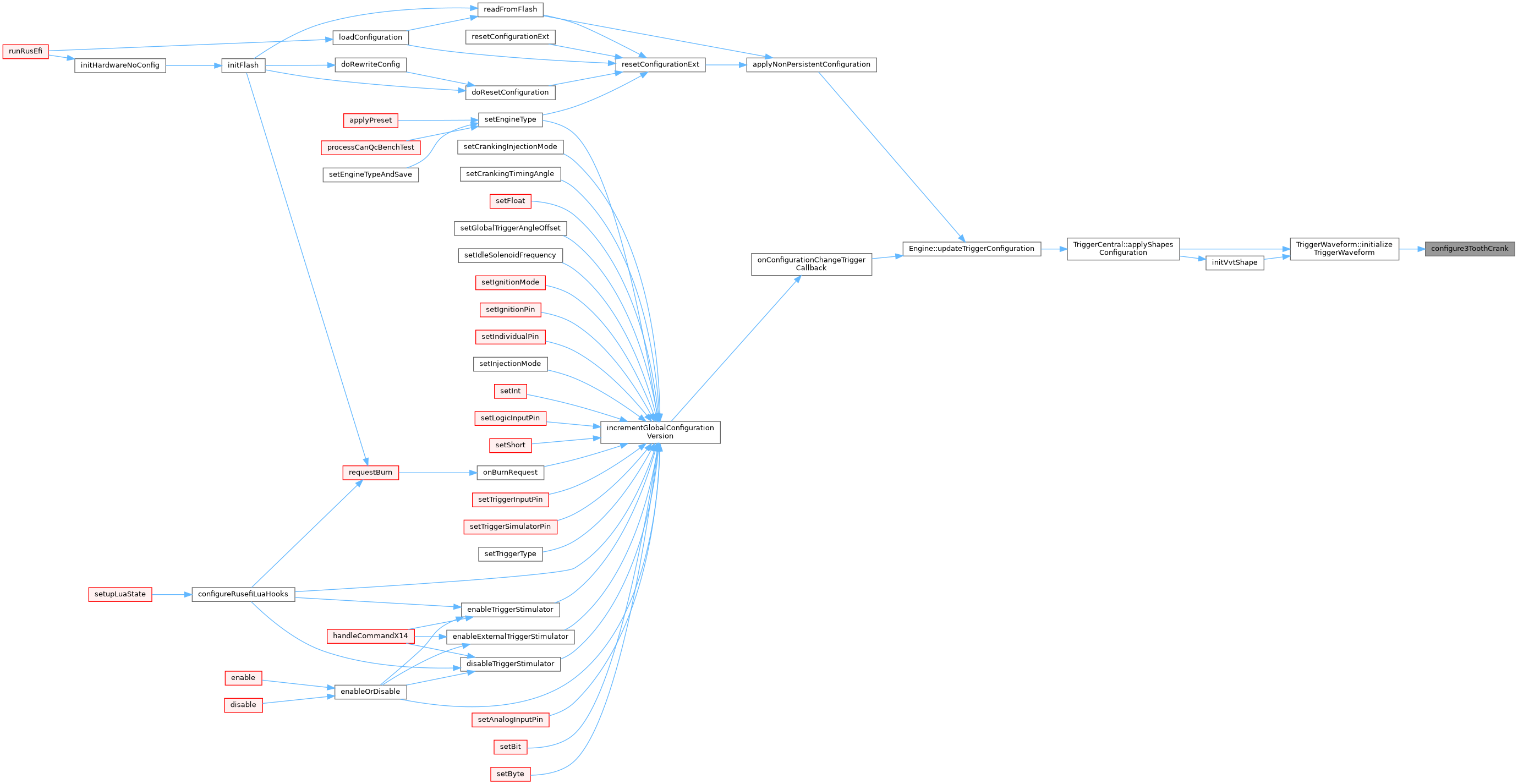
◆ configure3ToothCrank()
| void configure3ToothCrank | ( | TriggerWaveform * | s | ) |
Definition at line 182 of file trigger_universal.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
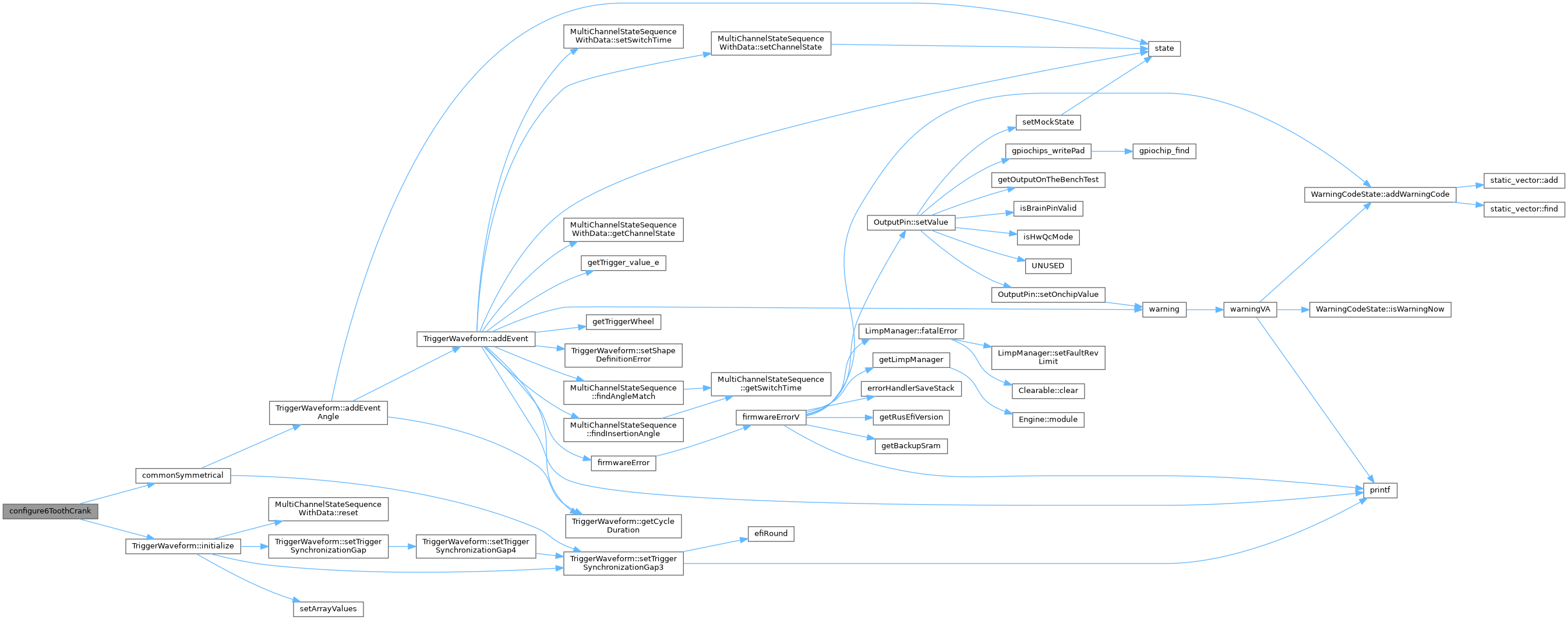
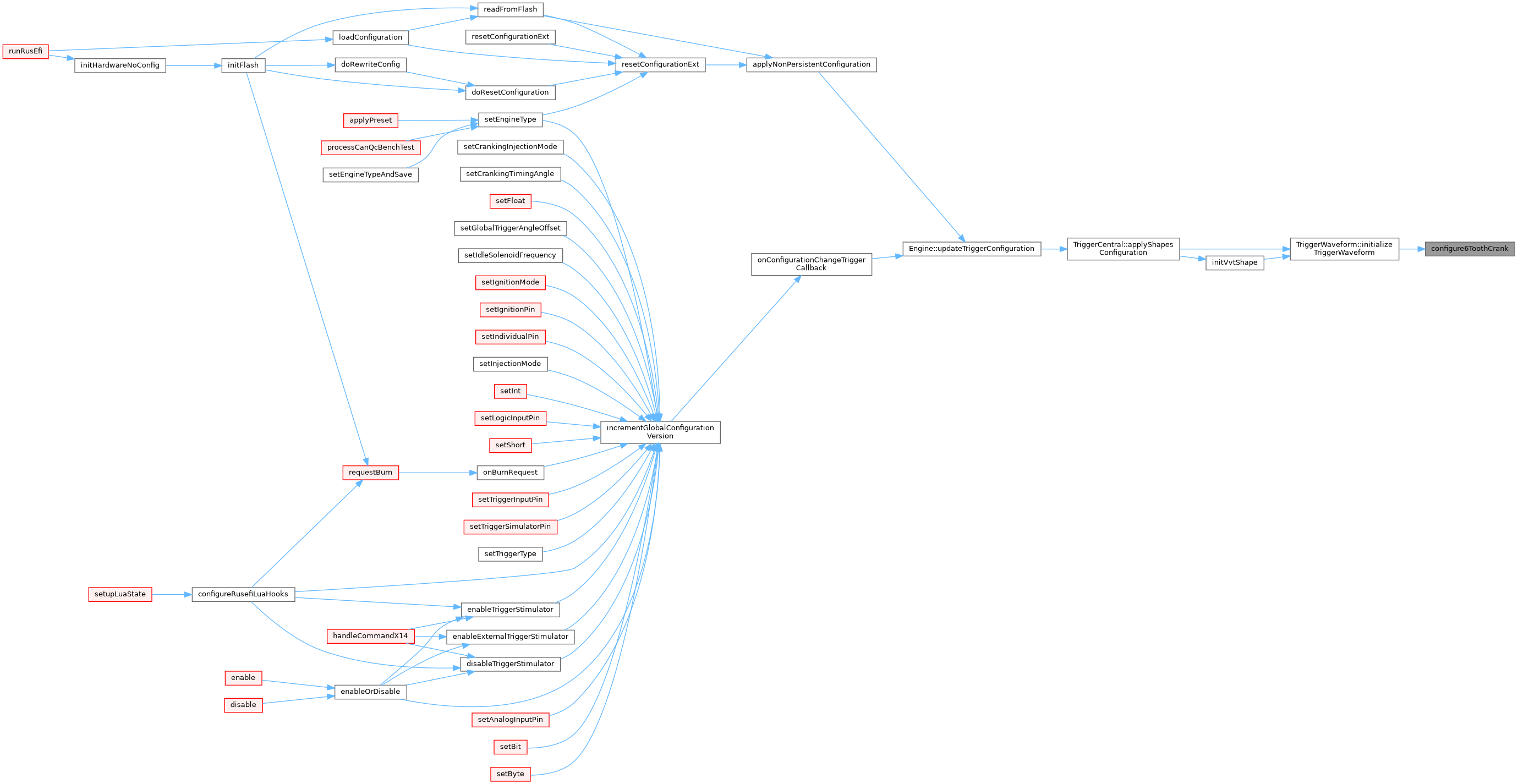
◆ configure6ToothCrank()
| void configure6ToothCrank | ( | TriggerWaveform * | s | ) |
Definition at line 187 of file trigger_universal.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
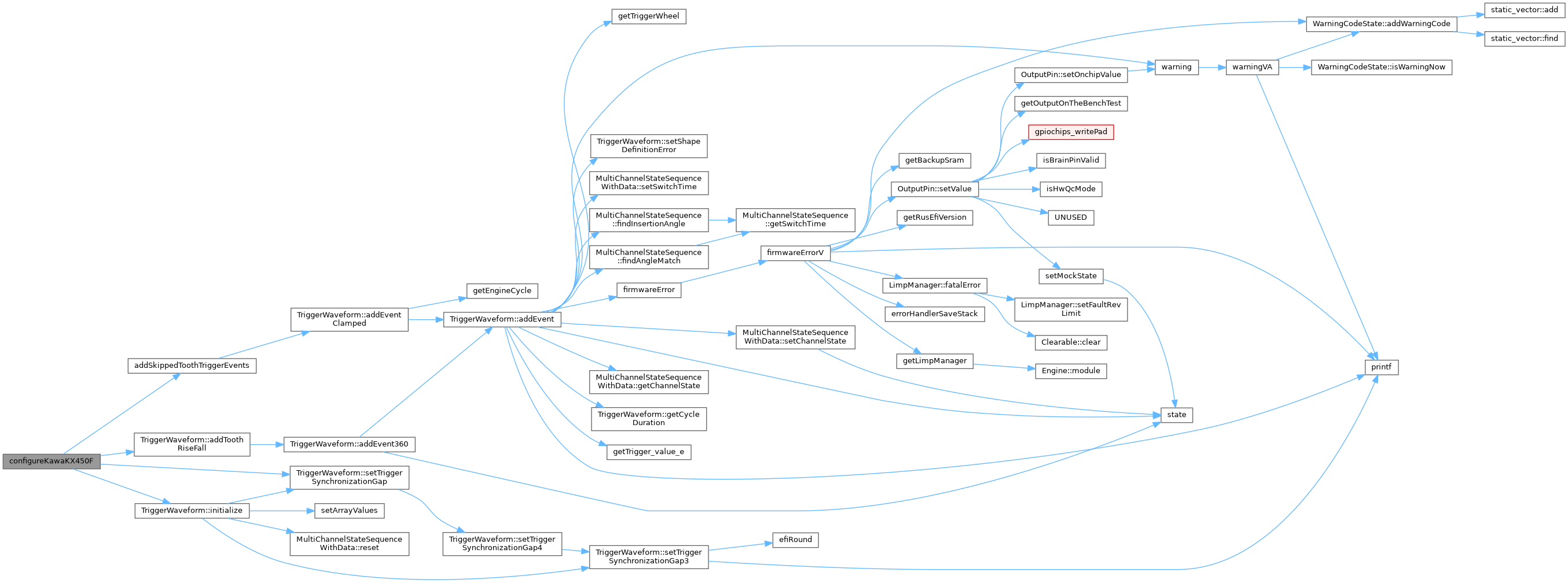
◆ configureKawaKX450F()
| void configureKawaKX450F | ( | TriggerWaveform * | s | ) |
https://rusefi.com/forum/viewtopic.php?f=5&t=1977
Definition at line 123 of file trigger_universal.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
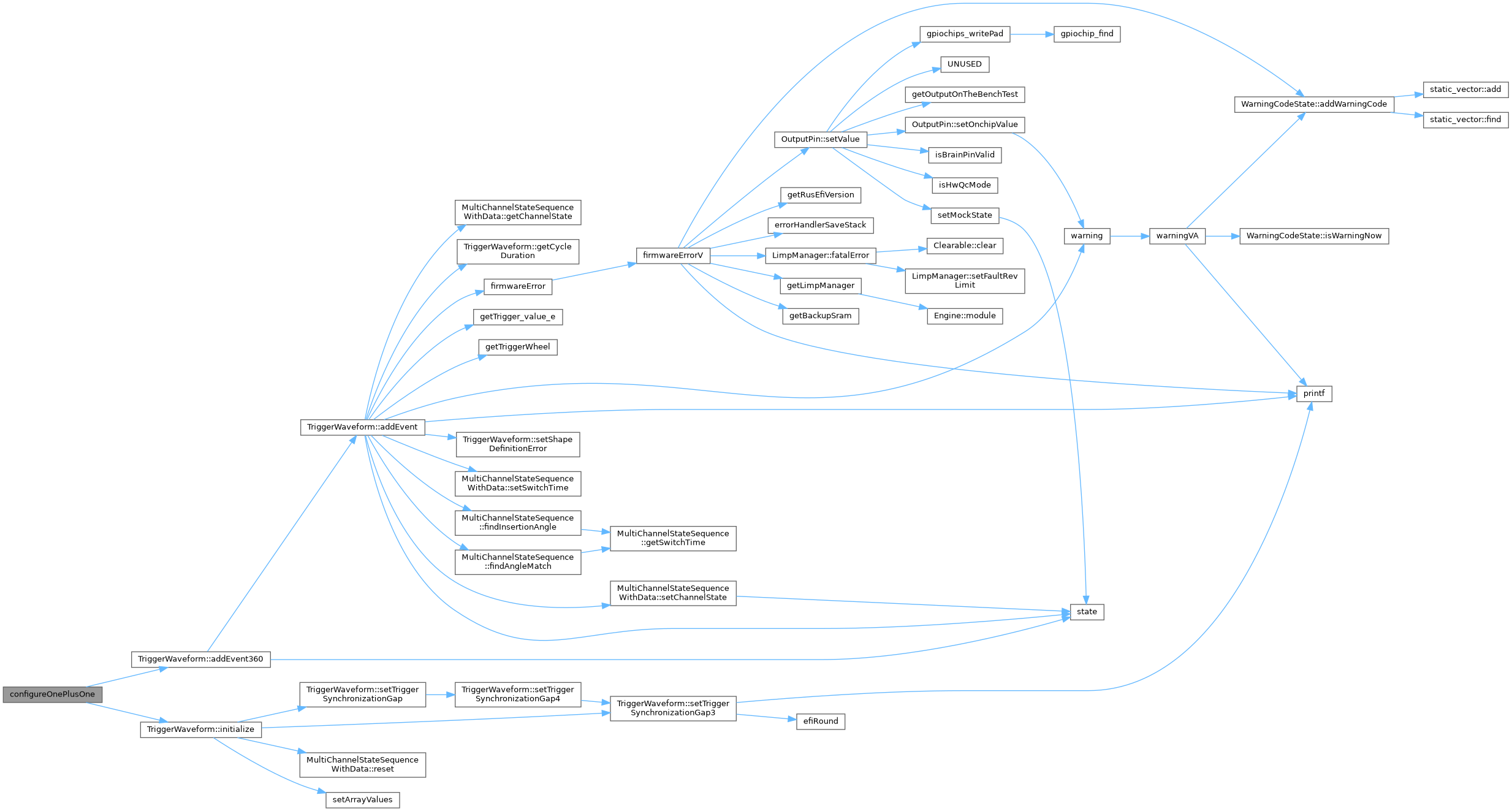
◆ configureOnePlusOne()
| void configureOnePlusOne | ( | TriggerWaveform * | s | ) |
Definition at line 71 of file trigger_universal.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().

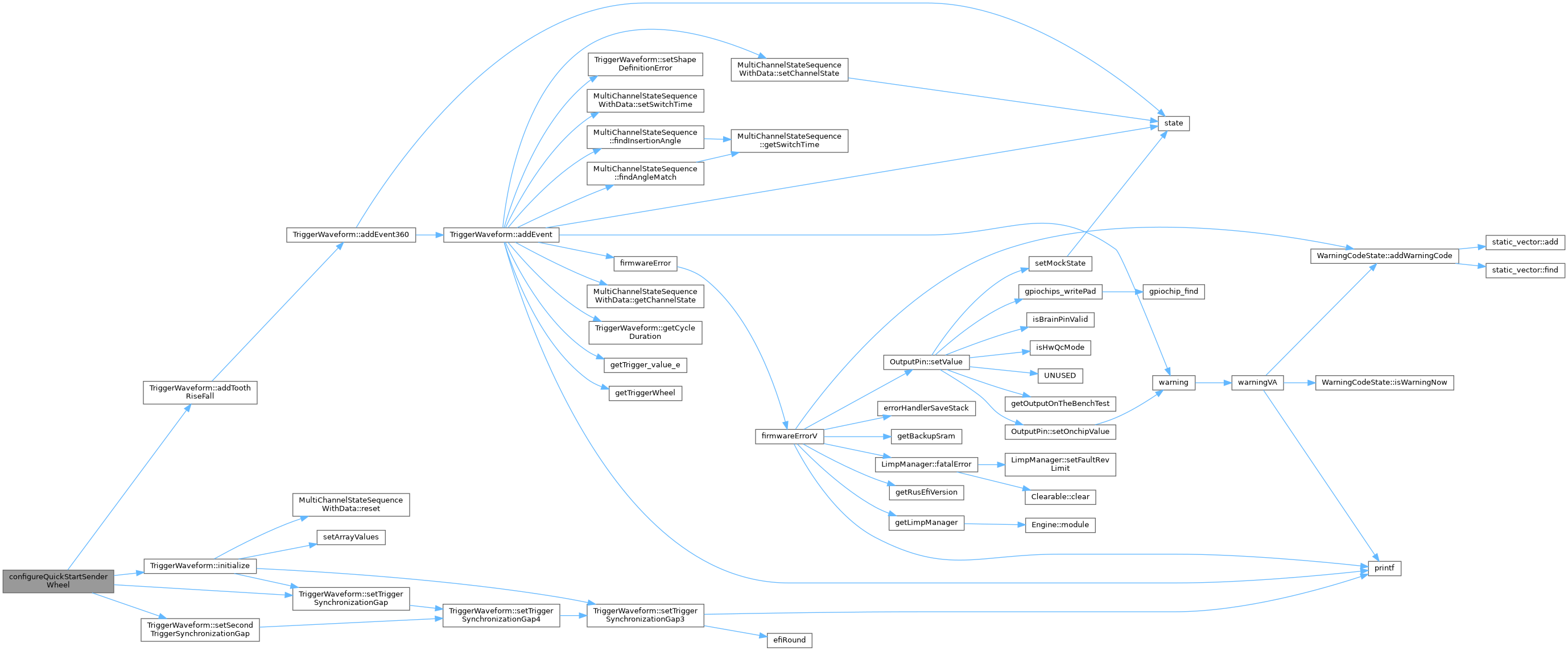
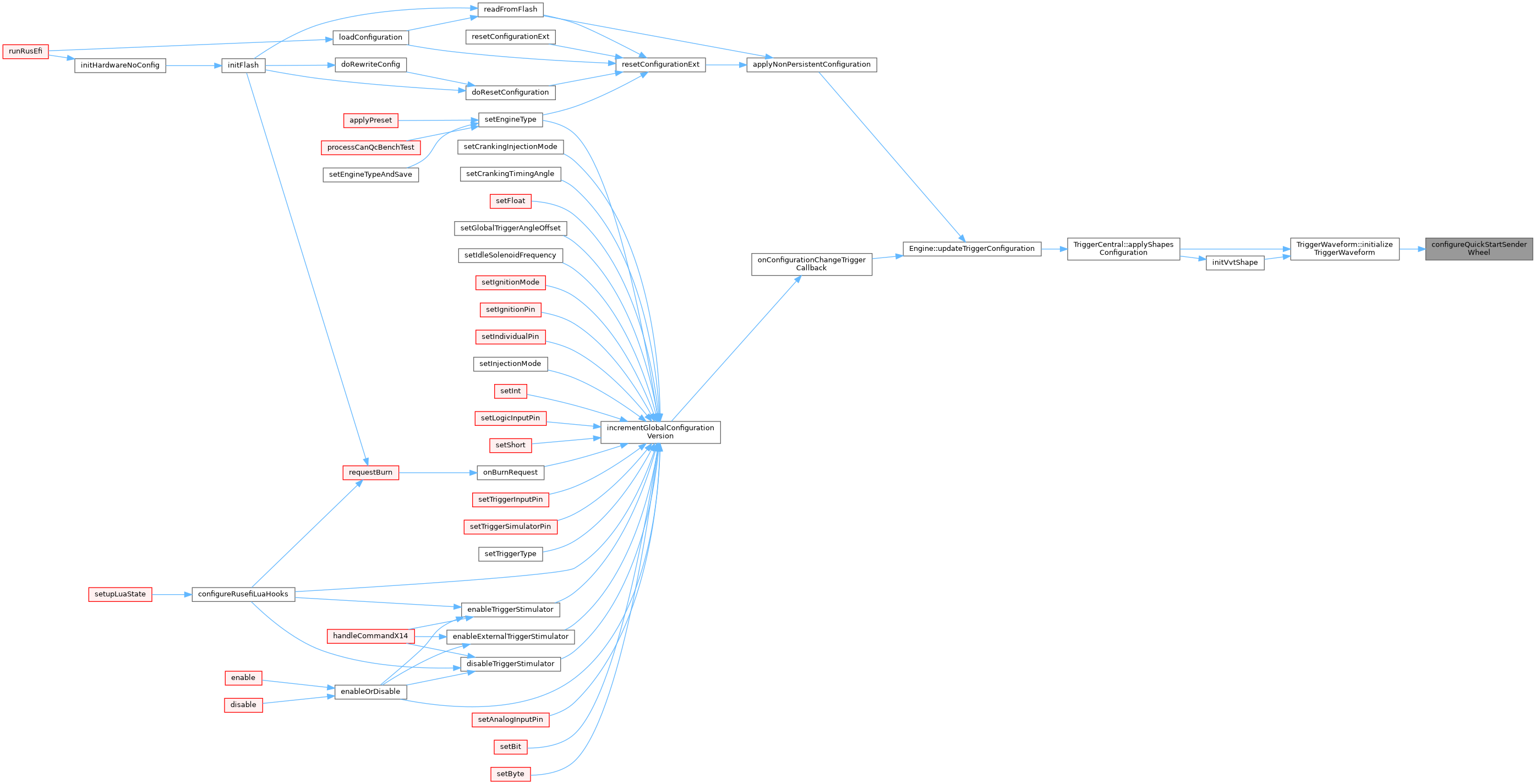
◆ configureQuickStartSenderWheel()
| void configureQuickStartSenderWheel | ( | TriggerWaveform * | s | ) |
Definition at line 138 of file trigger_universal.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
◆ initializeSkippedToothTrigger()
| void initializeSkippedToothTrigger | ( | TriggerWaveform * | s, |
| int | totalTeethCount, | ||
| int | skippedCount, | ||
| operation_mode_e | operationMode, | ||
| SyncEdge | syncEdge | ||
| ) |
Definition at line 43 of file trigger_universal.cpp.
Referenced by customTrigger(), initializeMitsubishi4gSymmetricalCrank(), and TriggerWaveform::initializeTriggerWaveform().