#include <tachometer.h>
Inheritance diagram for TachometerModule:
Collaboration diagram for TachometerModule:
Public Member Functions | |
| void | init () |
| void | onFastCallback () override |
 Public Member Functions inherited from EngineModule Public Member Functions inherited from EngineModule | |
| virtual void | initNoConfiguration () |
| virtual void | setDefaultConfiguration () |
| virtual void | onConfigurationChange (engine_configuration_s const *) |
| virtual void | onSlowCallback () |
| virtual void | onEngineStop () |
| virtual void | onIgnitionStateChanged (bool) |
| virtual bool | needsDelayedShutoff () |
| virtual void | onEnginePhase (float, efitick_t, angle_t, angle_t) |
Private Attributes | |
| bool | tachHasInit |
Detailed Description
Definition at line 11 of file tachometer.h.
Member Function Documentation
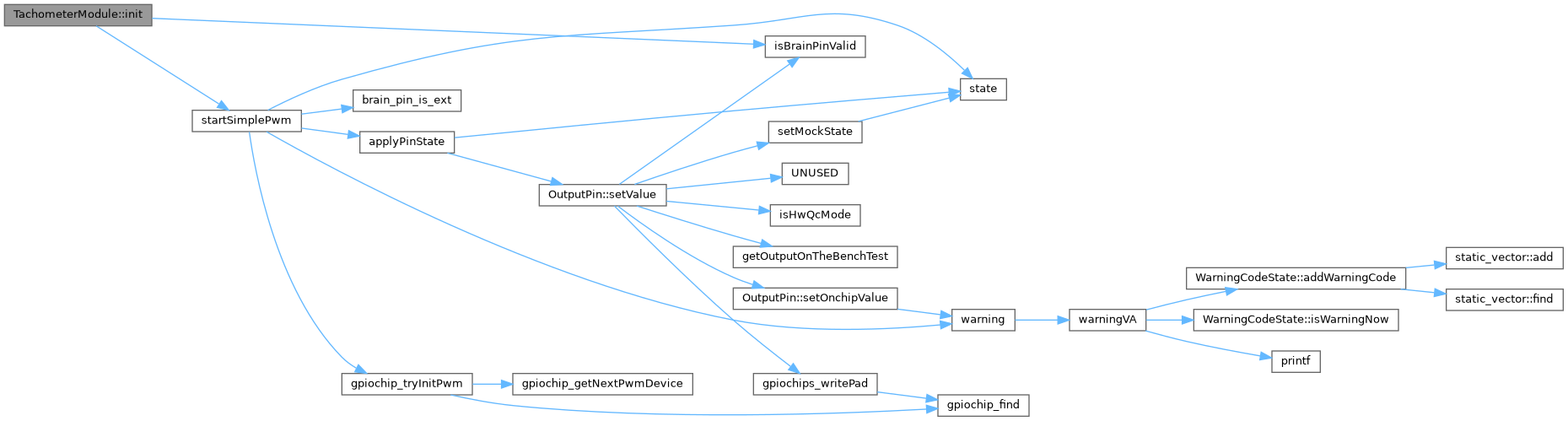
◆ init()
| void TachometerModule::init | ( | ) |
Definition at line 67 of file tachometer.cpp.
67 {
69
71 return;
72 }
73
75 "Tachometer",
78 NAN, 0.1f);
79
81}
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
void startSimplePwm(SimplePwm *state, const char *msg, Scheduler *executor, OutputPin *output, float frequency, float dutyCycle, pwm_gen_callback *callback)
Definition pwm_generator_logic.cpp:315
output_pin_e tachOutputPin
static SimplePwm tachControl("tach")
Here is the call graph for this function:
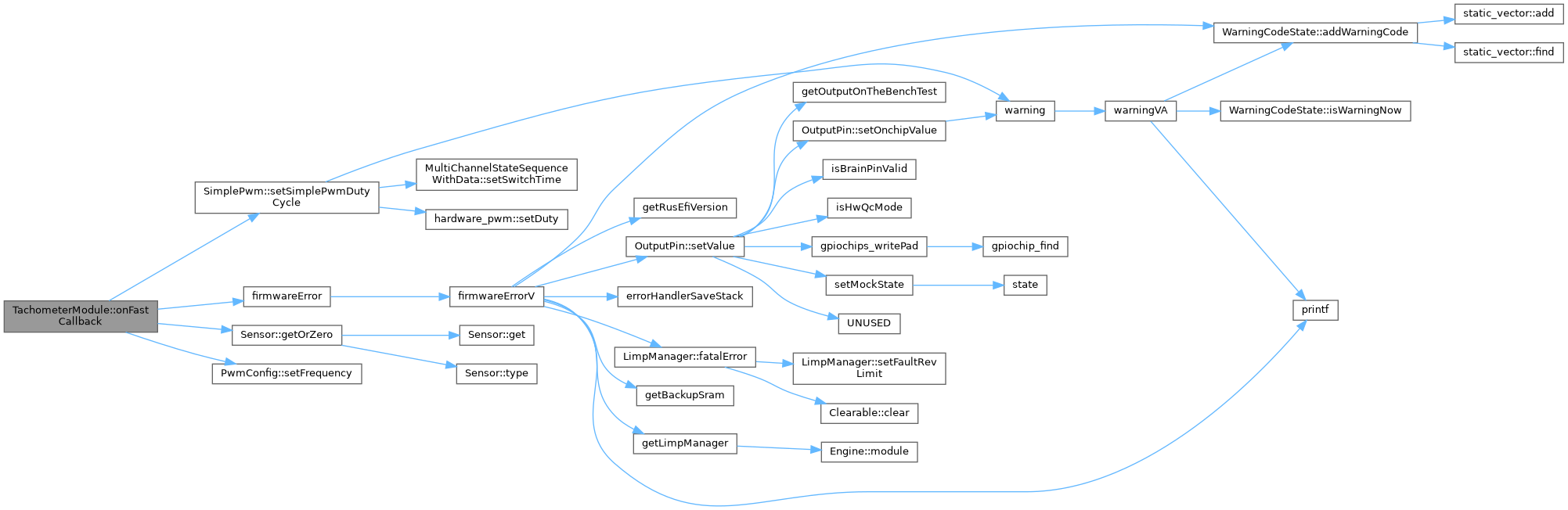
◆ onFastCallback()
|
overridevirtual |
Reimplemented from EngineModule.
Definition at line 30 of file tachometer.cpp.
30 {
31 // Only do anything if tach enabled
33 return;
34 }
35
36 // How many tach pulse periods do we have?
38
39 if (periods == 0 || periods > 10) {
42 return;
43 }
44
45 // What is the angle per tach output period?
47 float periodTimeMs = cycleTimeMs / periods;
48 tachFreq = 1000.0f / periodTimeMs;
49
51 // Simple case - duty explicitly set
53 } else {
54 // Constant high-time mode - compute the correct duty cycle
56 }
57
58 // In case Freq is under 1Hz, we stop pwm to avoid warnings!
60 tachFreq = NAN;
61 }
62
65}
void setSimplePwmDutyCycle(float dutyCycle) override
Definition pwm_generator_logic.cpp:49
@ CUSTOM_ERR_6709
@ Rpm
scaled_channel< uint16_t, 1000, 1 > tachPulsePerRev
bool tachPulseDurationAsDutyCycle
float tachPulseDuractionMs
Here is the call graph for this function:
Field Documentation
◆ tachHasInit
|
private |
Definition at line 16 of file tachometer.h.
Referenced by init(), and onFastCallback().
The documentation for this class was generated from the following files:
- controllers/modules/tachometer/tachometer.h
- controllers/modules/tachometer/tachometer.cpp