Enumerations | |
| enum | mc33810_drv_state { MC33810_DISABLED = 0 , MC33810_WAIT_INIT , MC33810_READY , MC33810_FAILED } |
| enum | mc33810_coil_state { COIL_IDLE = 0 , COIL_WAIT_SPARK_START , COIL_WAIT_SPARK_END } |
Functions | |
| SEMAPHORE_DECL (mc33810_wake, 10) | |
| static | THD_WORKING_AREA (mc33810_thread_wa, 256) |
| bool | isCor (uint16_t rx) |
| static void | mc33810_spkdur_cb (void *ptr, efitick_t now) |
| static | THD_FUNCTION (mc33810_driver_thread, p) |
| int | mc33810_add (brain_pin_e base, unsigned int index, const mc33810_config *cfg) |
| MC33810 driver add. | |
| void | mc33810_req_init () |
| int | getMc33810maxDwellTimer (mc33810maxDwellTimer_e value) |
| const mc33810_state_s * | mc33810getLiveData (size_t idx) |
Variables | |
| static thread_t * | mc33810_thread = NULL |
| static Mc33810 | chips [BOARD_MC33810_COUNT] |
| static const char * | mc33810_pin_names [MC33810_OUTPUTS] |
Enumeration Type Documentation
◆ mc33810_coil_state
| enum mc33810_coil_state |
| Enumerator | |
|---|---|
| COIL_IDLE | |
| COIL_WAIT_SPARK_START | |
| COIL_WAIT_SPARK_END | |
Definition at line 51 of file mc33810.cpp.
◆ mc33810_drv_state
| enum mc33810_drv_state |
| Enumerator | |
|---|---|
| MC33810_DISABLED | |
| MC33810_WAIT_INIT | |
| MC33810_READY | |
| MC33810_FAILED | |
Definition at line 44 of file mc33810.cpp.
Function Documentation
◆ getMc33810maxDwellTimer()
| int getMc33810maxDwellTimer | ( | mc33810maxDwellTimer_e | value | ) |
Definition at line 1009 of file mc33810.cpp.
Referenced by validateConfigOnStartUpOrBurn().

◆ isCor()
|
inline |
Definition at line 214 of file mc33810.cpp.
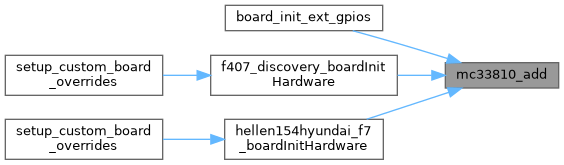
◆ mc33810_add()
| int mc33810_add | ( | brain_pin_e | base, |
| unsigned int | index, | ||
| const mc33810_config * | cfg | ||
| ) |
MC33810 driver add.
Checks for valid config
Definition at line 949 of file mc33810.cpp.
Referenced by board_init_ext_gpios(), f407_discovery_boardInitHardware(), and hellen154hyundai_f7_boardInitHardware().

◆ mc33810_req_init()
| void mc33810_req_init | ( | ) |
Definition at line 999 of file mc33810.cpp.
Referenced by handleCommandX14().

◆ mc33810_spkdur_cb()
|
static |
Definition at line 795 of file mc33810.cpp.
◆ mc33810getLiveData()
| const mc33810_state_s * mc33810getLiveData | ( | size_t | idx | ) |
Definition at line 1027 of file mc33810.cpp.
Referenced by getLiveData().

◆ SEMAPHORE_DECL()
| SEMAPHORE_DECL | ( | mc33810_wake | , |
| 10 | |||
| ) |
◆ THD_FUNCTION()
|
static |
Definition at line 745 of file mc33810.cpp.
◆ THD_WORKING_AREA()
|
static |
Variable Documentation
◆ chips
|
static |
Definition at line 203 of file mc33810.cpp.
Referenced by mc33810_add(), mc33810_req_init(), mc33810getLiveData(), and THD_FUNCTION().
◆ mc33810_pin_names
|
static |
Definition at line 205 of file mc33810.cpp.
Referenced by mc33810_add().
◆ mc33810_thread
|
static |
Definition at line 126 of file mc33810.cpp.