Functions | |
| Gpio | getCommsLedPin () |
| Gpio | getWarningLedPin () |
| static void | setPrometheusDefaults () |
| void | setPinConfigurationOverrides () |
| static void | prometheus_boardDefaultConfiguration () |
| Board-specific configuration defaults. | |
| Gpio | getRunningLedPin () |
| void | setup_custom_board_overrides () |
Variables | |
| static bool | is469 = true |
Function Documentation
◆ getCommsLedPin()
| Gpio getCommsLedPin | ( | ) |
See https://rusefi.com/s/super-uaefi
See https://rusefi.com/s/uaefi121
Definition at line 19 of file board_configuration.cpp.
◆ getRunningLedPin()
| Gpio getRunningLedPin | ( | ) |
Definition at line 193 of file board_configuration.cpp.
◆ getWarningLedPin()
| Gpio getWarningLedPin | ( | ) |
Definition at line 24 of file board_configuration.cpp.
◆ prometheus_boardDefaultConfiguration()
|
static |
Board-specific configuration defaults.
Definition at line 109 of file board_configuration.cpp.
109 {
110 // give a chance to trigger SWD programmer... Wait for 2 secs (=2000 ms).
111// chThdSleepMilliseconds(2000);
112
117
124
126
129
134
140
144
149
153
159
160
161 // debug pad
163
164 // not used
167
170
174
181
184
185 setPrometheusDefaults();
186
191}
@ A6
@ B3
@ D15
@ B9
@ C1
@ A1
@ B5
@ A10
@ C7
@ B14
@ C8
@ D10
@ C6
@ A9
@ E9
@ B12
@ C11
@ D9
@ D8
@ B15
@ D14
@ B2
@ B11
@ A2
@ A5
@ B8
@ B4
@ B7
@ A0
@ C10
@ D6
@ C12
@ B13
@ C9
@ A11
@ A8
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
air_pressure_sensor_config_s sensor
thermistor_conf_s config
adc_channel_e adcChannel
adc_channel_e hwChannel
adc_channel_e hwChannel
output_pin_e fuelPumpPin
adc_channel_e tps1_1AdcChannel
uint32_t tunerStudioSerialSpeed
pin_mode_e spi3SckMode
Gpio spi1misoPin
MAP_sensor_config_s map
afr_sensor_s afr
brain_input_pin_e vehicleSpeedSensorInputPin
ThermistorConf iat
pin_mode_e spi3MisoMode
Gpio triggerSimulatorPins[TRIGGER_SIMULATOR_PIN_COUNT]
Gpio stepperEnablePin
uint32_t uartConsoleSerialSpeed
ThermistorConf clt
idle_hardware_s idle
pin_mode_e spi3MosiMode
bool is_enabled_spi_3
Gpio spi3misoPin
Gpio spi1sckPin
bool useStepperIdle
bool isSdCardEnabled
output_pin_e fanPin
output_pin_e mainRelayPin
Gpio binarySerialTxPin
air_pressure_sensor_config_s baroSensor
bool is_enabled_spi_2
float adcVcc
output_pin_e injectionPins[MAX_CYLINDER_COUNT]
Gpio spi1mosiPin
pin_output_mode_e ignitionPinMode
Gpio canRxPin
Gpio binarySerialRxPin
bool is_enabled_spi_1
Gpio sdCardCsPin
float vbattDividerCoeff
Gpio spi3mosiPin
output_pin_e tachOutputPin
brain_input_pin_e triggerInputPins[TRIGGER_INPUT_PIN_COUNT]
output_pin_e malfunctionIndicatorPin
brain_input_pin_e camInputs[CAM_INPUTS_COUNT]
Gpio spi3sckPin
Gpio canTxPin
output_pin_e ignitionPins[MAX_CYLINDER_COUNT]
spi_device_e sdCardSpiDevice
adc_channel_e vbattAdcChannel
adc_channel_e throttlePedalPositionAdcChannel
Gpio stepperStepPin
Gpio stepperDirectionPin
float bias_resistor
Referenced by setup_custom_board_overrides().
Here is the call graph for this function:

Here is the caller graph for this function:

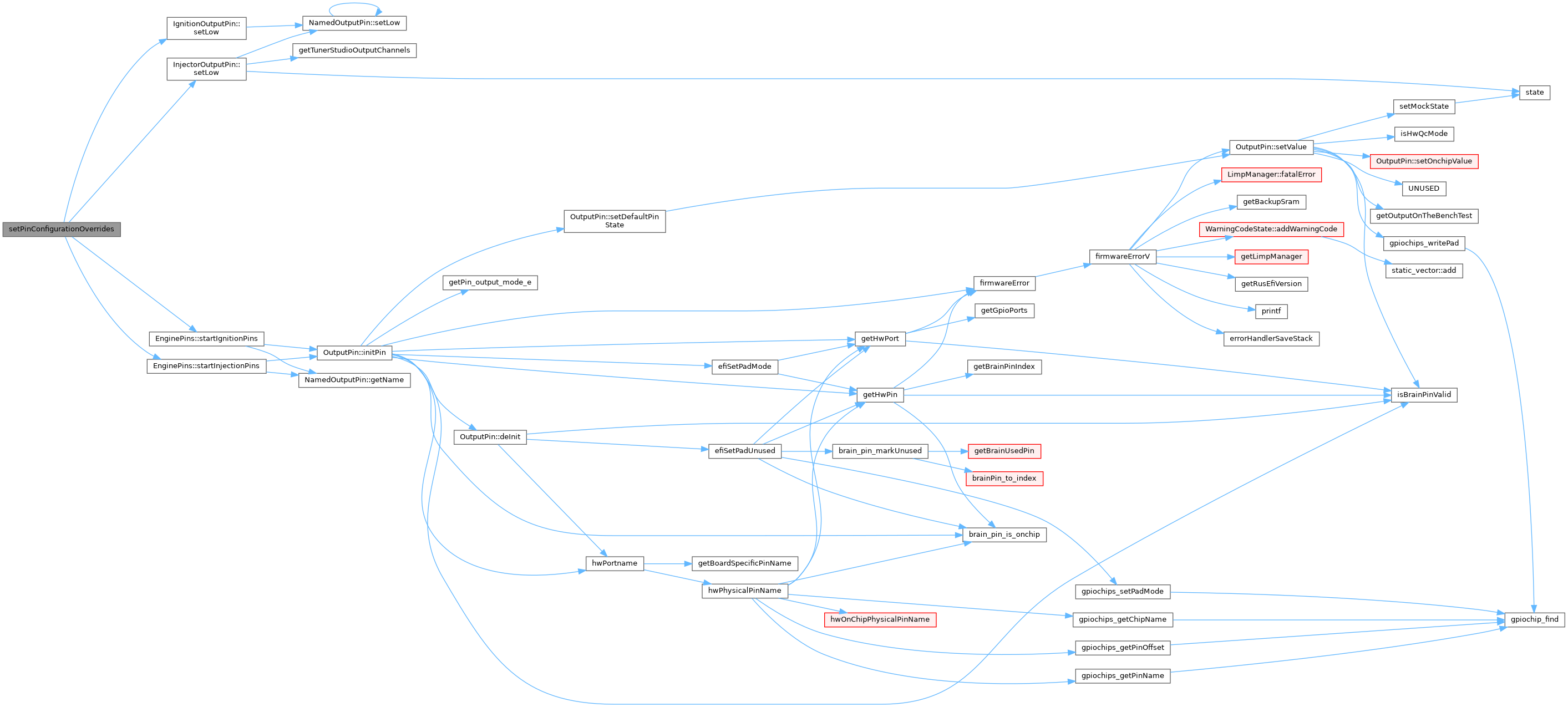
◆ setPinConfigurationOverrides()
| void setPinConfigurationOverrides | ( | void | ) |
Definition at line 64 of file board_configuration.cpp.
64 {
65#if 0
70
76
79
80 for (int i = 0; i < 4; i++) {
83 }
84#else
85 palSetPadMode(GPIOA, 10, PAL_MODE_OUTPUT_PUSHPULL);
86 palWritePad(GPIOA, 10, 1);
87 palSetPadMode(GPIOA, 9, PAL_MODE_OUTPUT_PUSHPULL);
88 palWritePad(GPIOA, 9, 1);
89 palSetPadMode(GPIOA, 8, PAL_MODE_OUTPUT_PUSHPULL);
90 palWritePad(GPIOA, 8, 1);
91 palSetPadMode(GPIOA, 11, PAL_MODE_OUTPUT_PUSHPULL);
92 palWritePad(GPIOA, 11, 1);
93
94 palSetPadMode(GPIOD, 9, PAL_MODE_OUTPUT_PUSHPULL);
95 palWritePad(GPIOD, 9, 0);
96 palSetPadMode(GPIOD, 15, PAL_MODE_OUTPUT_PUSHPULL);
97 palWritePad(GPIOD, 15, 0);
98 palSetPadMode(GPIOD, 10, PAL_MODE_OUTPUT_PUSHPULL);
99 palWritePad(GPIOD, 10, 0);
100 palSetPadMode(GPIOD, 14, PAL_MODE_OUTPUT_PUSHPULL);
101 palWritePad(GPIOD, 14, 0);
102#endif
103}
Here is the call graph for this function:
◆ setPrometheusDefaults()
|
static |
Definition at line 29 of file board_configuration.cpp.
29 {
31
34
38
40
43
46
48
52
54
59
61
62}
air_pressure_sensor_type_e type
int16_t rpm
injector_s injector
angle_t globalTriggerAngleOffset
bool useLinearCltSensor
float displacement
can_nbc_e canNbcType
ignition_mode_e ignitionMode
tps_limit_t tpsMin
cranking_parameters_s cranking
int16_t tpsErrorDetectionTooLow
uint32_t cylindersCount
float idleStepperReactionTime
bool useCicPidForIdle
int mapMinBufferLength
injection_mode_e crankingInjectionMode
tps_limit_t tpsMax
firing_order_e firingOrder
injection_mode_e injectionMode
pin_output_mode_e stepperDirectionPinMode
int16_t tpsErrorDetectionTooHigh
float crankingCycleBaseFuel[CRANKING_CYCLE_CLT_SIZE][CRANKING_CURVE_SIZE]
constexpr void setTable(TElement(&dest)[N][M], const VElement value)
Definition table_helper.h:167
Referenced by prometheus_boardDefaultConfiguration().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ setup_custom_board_overrides()
| void setup_custom_board_overrides | ( | ) |
Definition at line 197 of file board_configuration.cpp.
197 {
199}
std::optional< setup_custom_board_overrides_type > custom_board_DefaultConfiguration
Definition engine_configuration.cpp:70
static void prometheus_boardDefaultConfiguration()
Board-specific configuration defaults.
Definition board_configuration.cpp:109
Here is the call graph for this function:

Variable Documentation
◆ is469
|
static |
Definition at line 14 of file board_configuration.cpp.
Referenced by prometheus_boardDefaultConfiguration(), and setPinConfigurationOverrides().