#include <isotp.h>
Inheritance diagram for IsoTpRxTx:
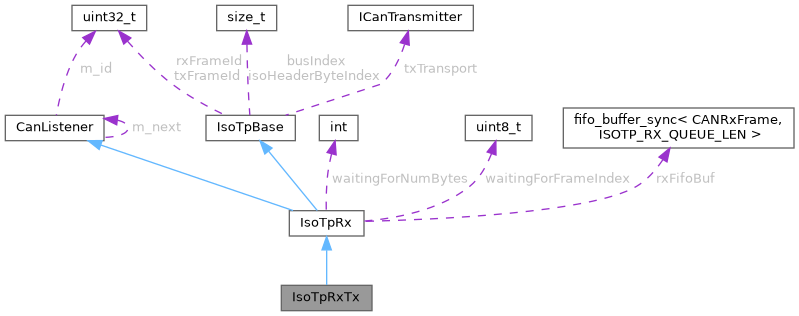
Collaboration diagram for IsoTpRxTx:
Public Member Functions | |
| IsoTpRxTx (size_t p_busIndex, uint32_t p_rxFrameId, uint32_t p_txFrameId) | |
| int | writeTimeout (const uint8_t *txbuf, size_t size, sysinterval_t timeout) |
 Public Member Functions inherited from IsoTpRx Public Member Functions inherited from IsoTpRx | |
| IsoTpRx (size_t p_busIndex, uint32_t p_rxFrameId, uint32_t p_txFrameId) | |
| ~IsoTpRx () | |
| void | reset () |
| bool | isRxEmpty () |
| virtual void | decodeFrame (const CANRxFrame &frame, efitick_t nowNt) |
| int | readTimeout (uint8_t *rxbuf, size_t *size, sysinterval_t timeout) |
| void | resetRxVerbose () |
| Public Member Functions inherited from CanListener | |
| CanListener (uint32_t id) | |
| CanListener * | processFrame (const size_t busIndex, const CANRxFrame &frame, efitick_t nowNt) |
| uint32_t | getId () |
| void | setNext (CanListener *next) |
| virtual CanListener * | request () |
| CanListener * | getNext () const |
| virtual bool | acceptFrame (const size_t busIndex, const CANRxFrame &frame) const |
| Public Member Functions inherited from IsoTpBase | |
| IsoTpBase (ICanTransmitter *p_txTransport, size_t p_busIndex, uint32_t p_rxFrameId, uint32_t p_txFrameId) | |
| int | sendFrame (const IsoTpFrameHeader &header, const uint8_t *data, int num, can_sysinterval_t timeout) |
| void | sendFlowControl (can_sysinterval_t timeout) |
| can_msg_t | transmit (CanTxMessage &ctfp, can_sysinterval_t timeout) |
Additional Inherited Members | |
| Data Fields inherited from IsoTpBase | |
| size_t | isoHeaderByteIndex = 0 |
| ICanTransmitter * | txTransport |
| size_t | busIndex |
| uint32_t | rxFrameId |
| uint32_t | txFrameId |
| Protected Attributes inherited from IsoTpRx | |
| fifo_buffer_sync< CANRxFrame, ISOTP_RX_QUEUE_LEN > | rxFifoBuf |
Detailed Description
Constructor & Destructor Documentation
◆ IsoTpRxTx()
|
inline |
Member Function Documentation
◆ writeTimeout()
| int IsoTpRxTx::writeTimeout | ( | const uint8_t * | txbuf, |
| size_t | size, | ||
| sysinterval_t | timeout | ||
| ) |
Definition at line 492 of file isotp.cpp.
492 {
494
497 }
498
500 return 0;
501
502 // 1 frame
504 IsoTpFrameHeader header;
508 }
509
510 // multiple frames
511
512 // send the first header frame (FF)
513 IsoTpFrameHeader header;
517 offset += numSent;
518 size -= numSent;
519
520 // get a flow control (FC) frame
521#if !EFI_UNIT_TEST // todo: add FC to unit-tests?
522 CANRxFrame rxmsg;
523 size_t numFcReceived = 0;
524 int separationTimeUs = 0;
525 while (numFcReceived < 3) {
526 // TODO: adjust timeout!
528 efiPrintf("IsoTp: Flow Control frame not received");
529 //warning(ObdCode::CUSTOM_ERR_CAN_COMMUNICATION, "CAN Flow Control frame not received");
530 return 0;
531 }
533
534 // if something is not ok
536 // should we expect only FC here?
537 continue;
538 }
539
540 // Ok, frame is FC
541 numFcReceived++;
543
544 if (flowStatus == CAN_FLOW_STATUS_ABORT) {
545 efiPrintf("IsoTp: Flow Control ABORT");
546 // TODO: error codes
547 return -4;
548 }
549
550 if (flowStatus == CAN_FLOW_STATUS_WAIT_MORE) {
551 // if the receiver is not ready yet and asks to wait for the next FC frame (give it 3 attempts)
552 if (numFcReceived < 3) {
553 continue;
554 }
555 // TODO: error codes
556 return -5;
557 }
558
559 if (flowStatus != CAN_FLOW_STATUS_OK) {
560 efiPrintf("IsoTp: Flow Control unknown Status %d", flowStatus);
561 // TODO: error codes
562 return -6;
563 }
564
567 if (blockSize != 0) {
568 // todo: process other Flow Control fields (see ISO 15765-2)
569 efiPrintf("IsoTp: Flow Control blockSize is not supported %d", blockSize);
570 // TODO: error codes
571 return -7;
572 }
573
574 if (minSeparationTime <= 0x7f) {
575 // mS units
576 separationTimeUs = minSeparationTime * 1000;
577 } else if ((minSeparationTime >= 0xf1) && (minSeparationTime <= 0xf9)) {
578 // 100 uS units
579 separationTimeUs = (minSeparationTime - 0xf0) * 100;
580 }
581
582 break;
583 }
584#endif /* EFI_UNIT_TEST */
585
586 // send the rest of the data
587 uint8_t idx = 1;
590 // send the consecutive frames
592 header.index = ((idx++) & 0x0f);
593 header.numBytes = len;
595 if (numSent < 1)
596 break;
597 offset += numSent;
598 size -= numSent;
599
600#if ! EFI_UNIT_TEST
601 if (separationTimeUs) {
602 chThdSleepMicroseconds(separationTimeUs);
603 }
604#endif // EFI_UNIT_TEST
605 }
607}
int sendFrame(const IsoTpFrameHeader &header, const uint8_t *data, int num, can_sysinterval_t timeout)
Definition isotp.cpp:14
Definition isotp.h:36
fifo_buffer_sync< CANRxFrame, ISOTP_RX_QUEUE_LEN > rxFifoBuf
Definition isotp.h:235
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:81
Definition can_mocks.h:36
bool verboseIsoTp
Here is the call graph for this function:

The documentation for this class was generated from the following files: