Functions | |
| template<> | |
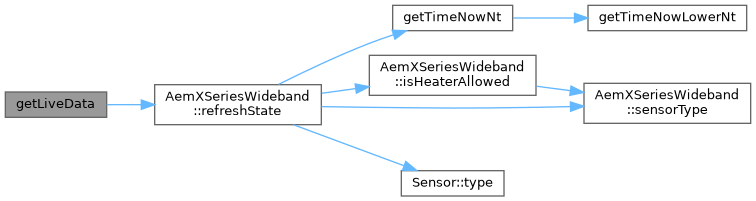
| const wideband_state_s * | getLiveData (size_t idx) |
| void | initLambda () |
Variables | |
| static GetAfrWrapper | afrWrapper |
| static FunctionPointerSensor | lambdaSensor (SensorType::Lambda1, []() { return afrWrapper.getLambda();}) |
| static FunctionPointerSensor | lambdaSensor2 (SensorType::Lambda2, []() { return afrWrapper.getLambda2();}) |
| AemXSeriesWideband | aem1 (0, SensorType::Lambda1) |
| static AemXSeriesWideband | aem2 (1, SensorType::Lambda2) |
Function Documentation
◆ getLiveData()
template<>
| const wideband_state_s * getLiveData | ( | size_t | idx | ) |
Definition at line 37 of file init_lambda.cpp.
37 {
38#if EFI_CAN_SUPPORT
39 switch (idx) {
40 case 0:
43 case 1:
46 }
47#endif
48
49 return nullptr;
50}
static AemXSeriesWideband aem2(1, SensorType::Lambda2)
AemXSeriesWideband aem1(0, SensorType::Lambda1)
Here is the call graph for this function:
◆ initLambda()
| void initLambda | ( | ) |
Definition at line 52 of file init_lambda.cpp.
52 {
53 // first we register the smoothed sensors for the early return on the can wbo case
56
57#if EFI_CAN_SUPPORT
60 criticalError("CAN read and write are required to use CAN wideband.");
61 return;
62 }
63
66
67 return;
68 }
69#endif
70
71#if EFI_UNIT_TEST
72 constexpr bool isUnitTest = true;
73#else
74 constexpr bool isUnitTest = false;
75#endif
76
77 // CANbus option is handled above, let's handle analog inputs conditionally to give Lua sensors a chance
80 }
83 }
84}
StoredValueSensor smoothedLambda2Sensor(SensorType::SmoothedLambda2, MS2NT(500))
StoredValueSensor smoothedLambda1Sensor(SensorType::SmoothedLambda1, MS2NT(500))
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
static FunctionPointerSensor lambdaSensor2(SensorType::Lambda2, []() { return afrWrapper.getLambda2();})
static FunctionPointerSensor lambdaSensor(SensorType::Lambda1, []() { return afrWrapper.getLambda();})
adc_channel_e hwChannel2
adc_channel_e hwChannel
afr_sensor_s afr
bool canWriteEnabled
bool canReadEnabled
bool enableAemXSeries
Referenced by initNewSensors().
Here is the call graph for this function:

Here is the caller graph for this function:

Variable Documentation
◆ aem1
| AemXSeriesWideband aem1(0, SensorType::Lambda1) | ( | 0 | , |
| SensorType::Lambda1 | |||
| ) |
Referenced by getLiveData(), initLambda(), and uaefi_slowCallback().
◆ aem2
|
static |
Referenced by getLiveData(), and initLambda().
◆ afrWrapper
|
static |
Definition at line 17 of file init_lambda.cpp.
◆ lambdaSensor
|
static |
Referenced by ClosedLoopFuelCellImpl::configure(), and initLambda().
◆ lambdaSensor2
|
static |
Referenced by initLambda().