Functions | |
| size_t | getWidebandBus () |
| void | sendWidebandInfo () |
| void | handleWidebandCan (const size_t busIndex, const CANRxFrame &frame) |
| void | pingWideband (uint8_t hwIndex) |
| void | setWidebandOffsetNoWait (uint8_t hwIndex, uint8_t index) |
| void | restartWideband () |
| void | setWidebandOffset (uint8_t hwIndex, uint8_t index) |
| void | setWidebandSensorType (uint8_t hwIndex, uint8_t type) |
| void | updateWidebandFirmware (uint8_t hwIndex) |
| void | updateWidebandFirmwareFromFile (uint8_t hwIndex) |
Function Documentation
◆ getWidebandBus()
| size_t getWidebandBus | ( | ) |
Definition at line 22 of file rusefi_wideband.cpp.
Referenced by AemXSeriesWideband::acceptFrame(), handleWidebandCan(), pingWideband(), sendWidebandInfo(), setWidebandOffsetNoWait(), setWidebandSensorType(), updateWidebandFirmware(), and updateWidebandFirmwareFromFile().

◆ handleWidebandCan()
| void handleWidebandCan | ( | const size_t | busIndex, |
| const CANRxFrame & | frame | ||
| ) |
Definition at line 31 of file rusefi_wideband.cpp.
Referenced by processCanRxMessage().


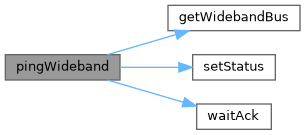
◆ pingWideband()
| void pingWideband | ( | uint8_t | hwIndex | ) |
Definition at line 152 of file rusefi_wideband.cpp.
Referenced by executeTSCommand(), and initBenchTest().

◆ restartWideband()
| void restartWideband | ( | ) |
Definition at line 188 of file rusefi_wideband.cpp.
Referenced by executeTSCommand().

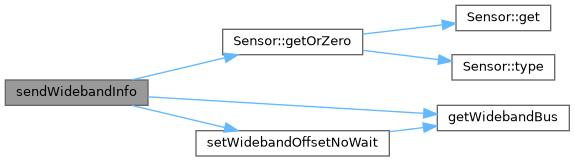
◆ sendWidebandInfo()
| void sendWidebandInfo | ( | ) |
Definition at line 194 of file rusefi_wideband.cpp.
Referenced by CanWrite::PeriodicTask().

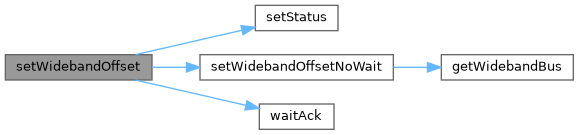
◆ setWidebandOffset()
| void setWidebandOffset | ( | uint8_t | hwIndex, |
| uint8_t | index | ||
| ) |
Definition at line 93 of file rusefi_wideband.cpp.
Referenced by executeTSCommand(), and initBenchTest().

◆ setWidebandOffsetNoWait()
| void setWidebandOffsetNoWait | ( | uint8_t | hwIndex, |
| uint8_t | index | ||
| ) |
Definition at line 80 of file rusefi_wideband.cpp.
Referenced by sendWidebandInfo(), and setWidebandOffset().


◆ setWidebandSensorType()
| void setWidebandSensorType | ( | uint8_t | hwIndex, |
| uint8_t | type | ||
| ) |
Definition at line 123 of file rusefi_wideband.cpp.
Referenced by executeTSCommand().

◆ updateWidebandFirmware()
| void updateWidebandFirmware | ( | uint8_t | hwIndex | ) |
Definition at line 401 of file rusefi_wideband.cpp.
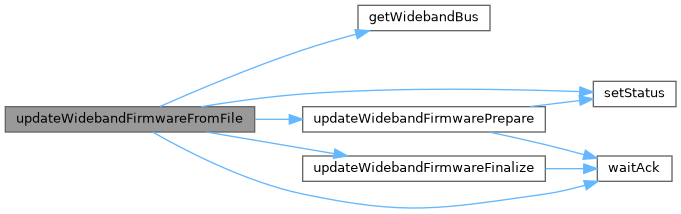
◆ updateWidebandFirmwareFromFile()
| void updateWidebandFirmwareFromFile | ( | uint8_t | hwIndex | ) |
Definition at line 327 of file rusefi_wideband.cpp.