Functions | |
| void | initSpeedometer () |
| void | speedoUpdate () |
Function Documentation
◆ initSpeedometer()
| void initSpeedometer | ( | ) |
Definition at line 31 of file speedometer.cpp.
31 {
33
35 return;
36 }
37
39 "Speedometer",
42 NAN, 0.5f);
43
45}
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:81
void startSimplePwm(SimplePwm *state, const char *msg, Scheduler *executor, OutputPin *output, float frequency, float dutyCycle, pwm_gen_callback *callback)
Definition pwm_generator_logic.cpp:315
static SimplePwm speedoPwm("speedo")
output_pin_e speedometerOutputPin
Referenced by commonInitEngineController().
Here is the call graph for this function:
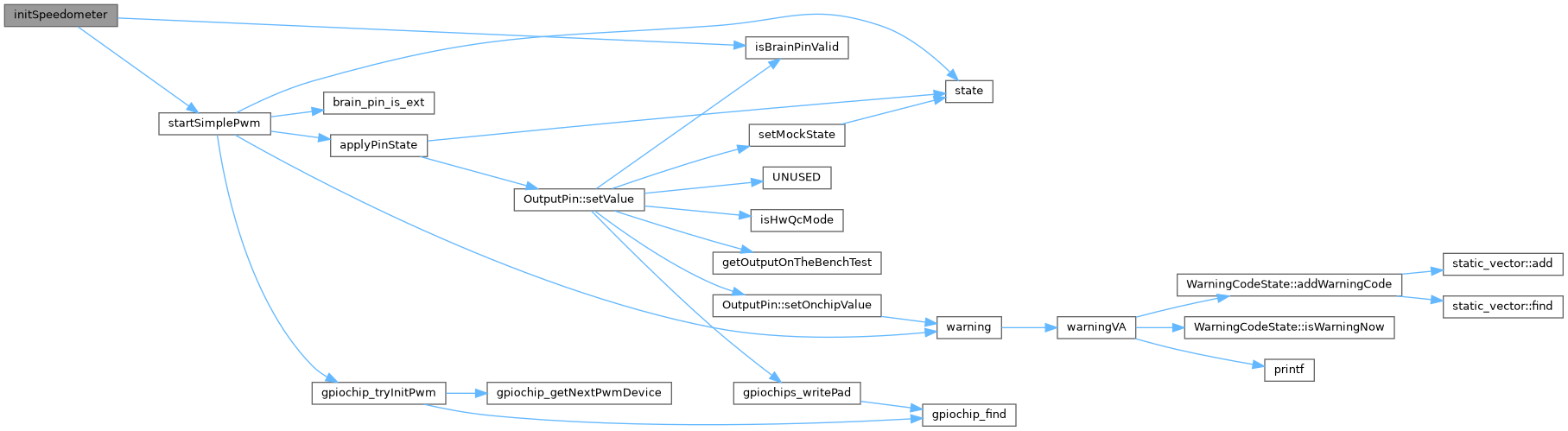
Here is the caller graph for this function:

◆ speedoUpdate()
| void speedoUpdate | ( | ) |
Definition at line 15 of file speedometer.cpp.
15 {
17 return;
18 }
19
21 float kps = kph * (1. / 3600);
23
24 if (freq < 1) {
25 freq = NAN;
26 }
27
29}
@ VehicleSpeed
uint16_t speedometerPulsePerKm
Referenced by Engine::periodicFastCallback().
Here is the call graph for this function:
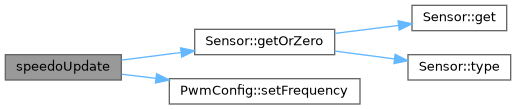
Here is the caller graph for this function:
