Detailed Description
Position sensor hardware layer - PAL version.
todo: VVT implementation is a nasty copy-paste :(
see digital_input_icu.cp
- Date
- Dec 30, 2012
Definition in file trigger_input_exti.cpp.
Functions | |
| static void | shaft_callback (void *arg, efitick_t stamp) |
| static void | cam_callback (void *arg, efitick_t stamp) |
| int | extiTriggerTurnOnInputPin (const char *msg, int index, bool isTriggerShaft) |
| void | extiTriggerTurnOffInputPin (brain_pin_e brainPin) |
Variables | |
| static ioline_t | shaftLines [TRIGGER_INPUT_PIN_COUNT] |
| static ioline_t | camLines [CAM_INPUTS_COUNT] |
Function Documentation
◆ cam_callback()
|
static |
Definition at line 39 of file trigger_input_exti.cpp.
39 {
40 int index = (int)arg;
42
43 bool rise = (palReadLine(pal_line) == PAL_HIGH);
44
45 hwHandleVvtCamSignal(rise, stamp, index);
46}
void hwHandleVvtCamSignal(bool isRising, efitick_t nowNt, int index)
Definition trigger_central.cpp:272
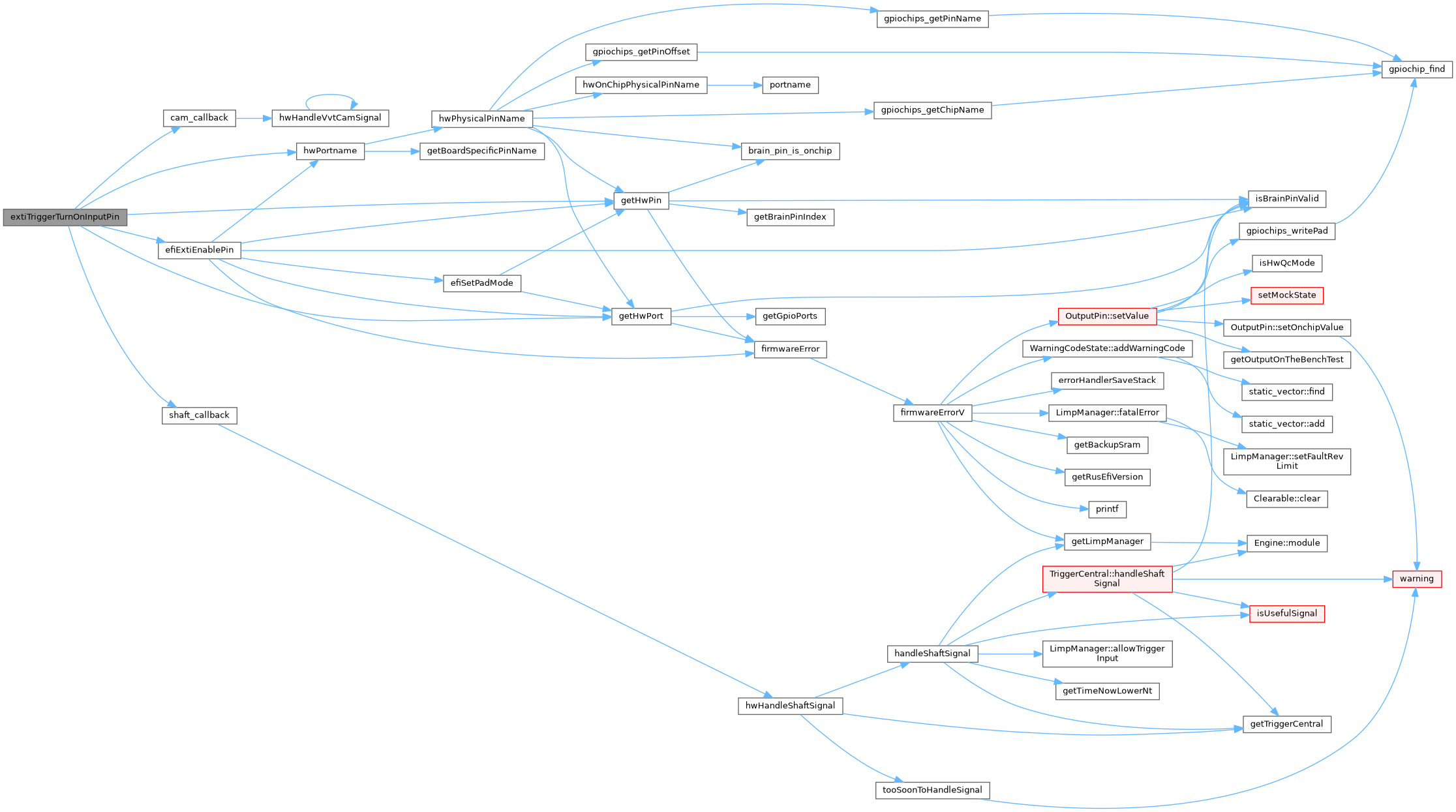
Referenced by extiTriggerTurnOnInputPin().
Here is the call graph for this function:

Here is the caller graph for this function:

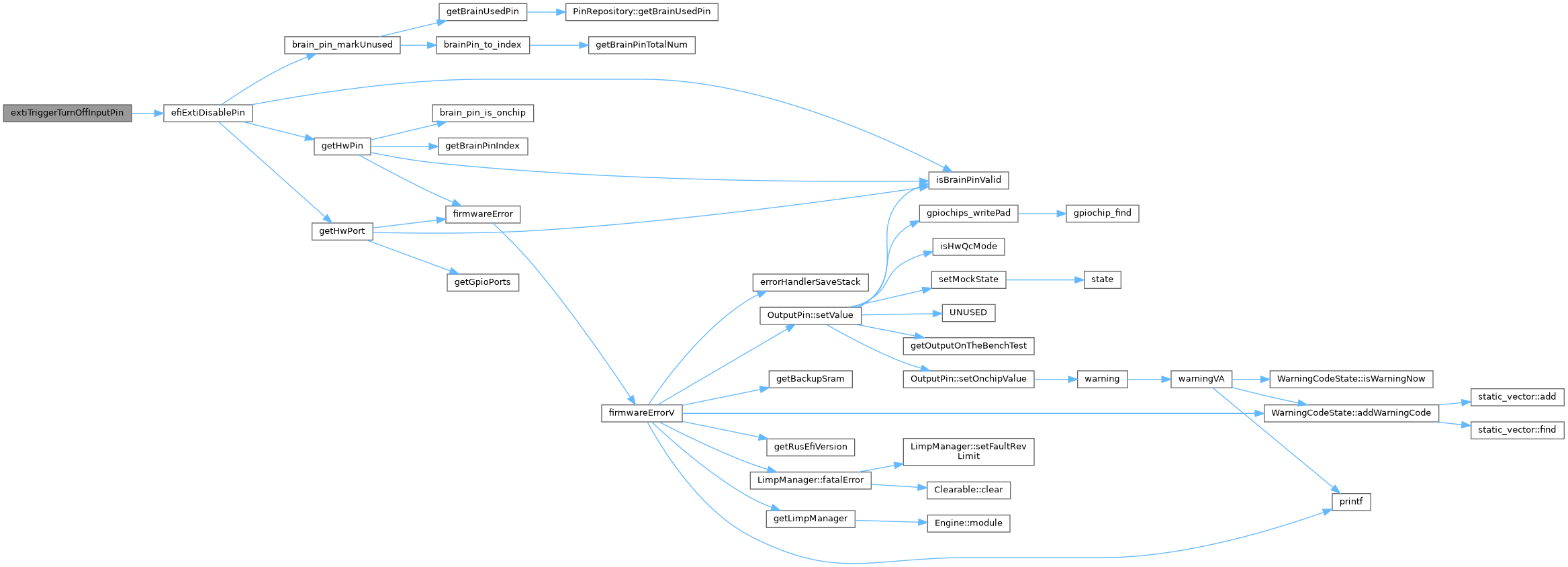
◆ extiTriggerTurnOffInputPin()
| void extiTriggerTurnOffInputPin | ( | brain_pin_e | brainPin | ) |
Definition at line 75 of file trigger_input_exti.cpp.
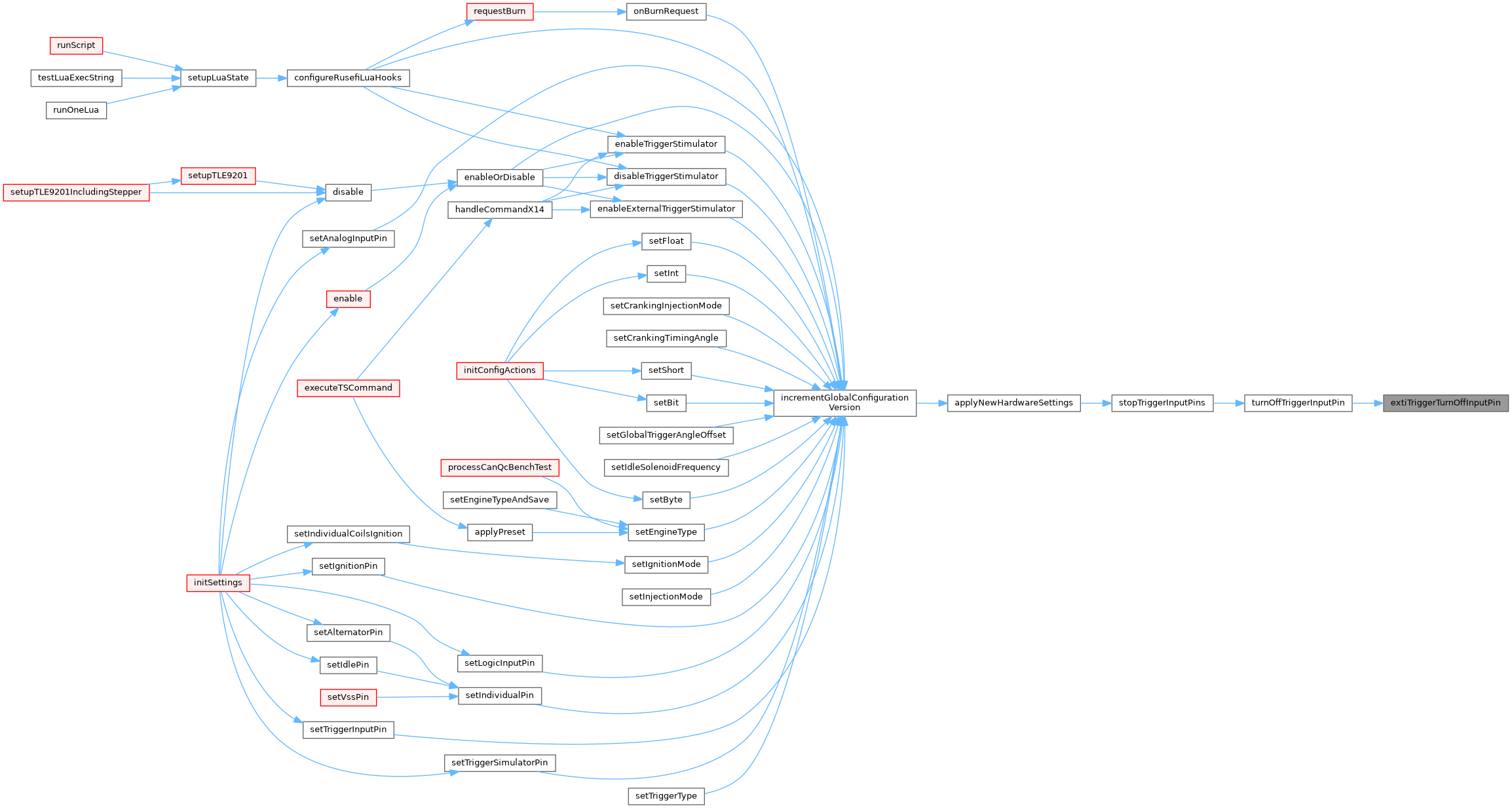
Referenced by turnOffTriggerInputPin().
Here is the call graph for this function:
Here is the caller graph for this function:
◆ extiTriggerTurnOnInputPin()
Definition at line 52 of file trigger_input_exti.cpp.
52 {
53 brain_pin_e brainPin = isTriggerShaft ? engineConfiguration->triggerInputPins[index] : engineConfiguration->camInputs[index];
54
56
57 /* TODO:
58 * * do not set to both edges if we need only one
59 * * simplify callback in case of one edge */
62 return -1;
63 }
64
66 if (isTriggerShaft) {
67 shaftLines[index] = pal_line;
68 } else {
69 camLines[index] = pal_line;
70 }
71
72 return 0;
73}
int efiExtiEnablePin(const char *msg, brain_pin_e brainPin, uint32_t mode, ExtiCallback cb, void *cb_data)
Definition digital_input_exti.cpp:38
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:81
brain_input_pin_e triggerInputPins[TRIGGER_INPUT_PIN_COUNT]
brain_input_pin_e camInputs[CAM_INPUTS_COUNT]
static void shaft_callback(void *arg, efitick_t stamp)
Definition trigger_input_exti.cpp:27
static void cam_callback(void *arg, efitick_t stamp)
Definition trigger_input_exti.cpp:39
Here is the call graph for this function:
◆ shaft_callback()
|
static |
Definition at line 27 of file trigger_input_exti.cpp.
27 {
28 // do the time sensitive things as early as possible!
29 int index = (int)arg;
31 bool rise = (palReadLine(pal_line) == PAL_HIGH);
32
33 // todo: support for 3rd trigger input channel
34 // todo: start using real event time from HW event, not just software timer?
35
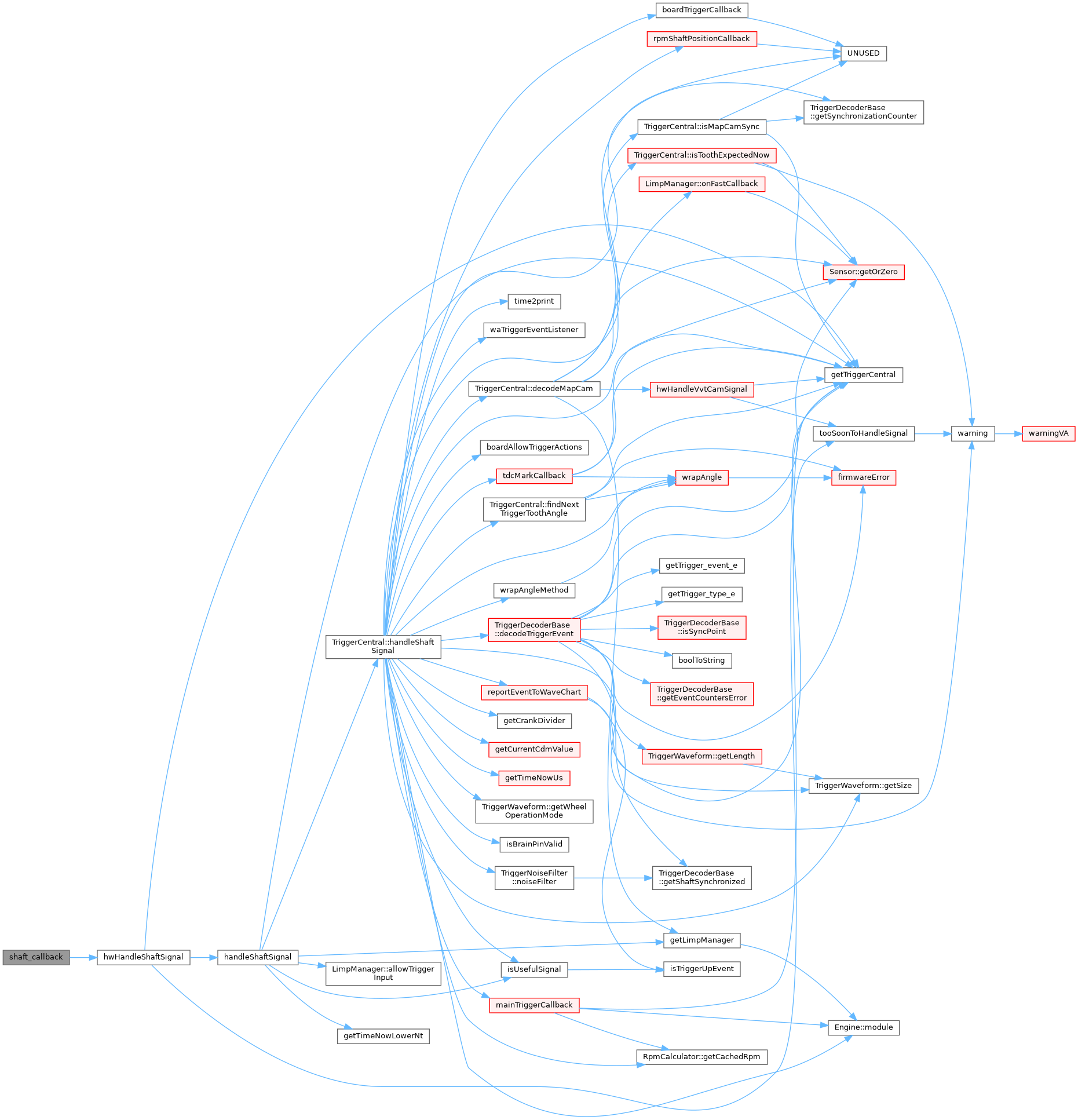
36 hwHandleShaftSignal(index, rise, stamp);
37}
void hwHandleShaftSignal(int signalIndex, bool isRising, efitick_t timestamp)
Definition trigger_central.cpp:469
Referenced by extiTriggerTurnOnInputPin().
Here is the call graph for this function:
Here is the caller graph for this function:

Variable Documentation
◆ camLines
|
static |
Definition at line 25 of file trigger_input_exti.cpp.
Referenced by cam_callback(), and extiTriggerTurnOnInputPin().
◆ shaftLines
|
static |
Definition at line 24 of file trigger_input_exti.cpp.
Referenced by extiTriggerTurnOnInputPin(), and shaft_callback().