#include <shift_torque_reduction_controller.h>
Public Member Functions | |
| void | update () |
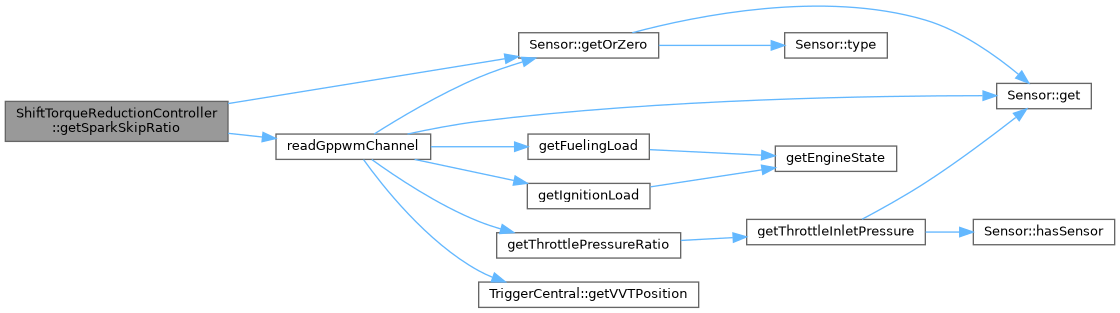
| float | getSparkSkipRatio () |
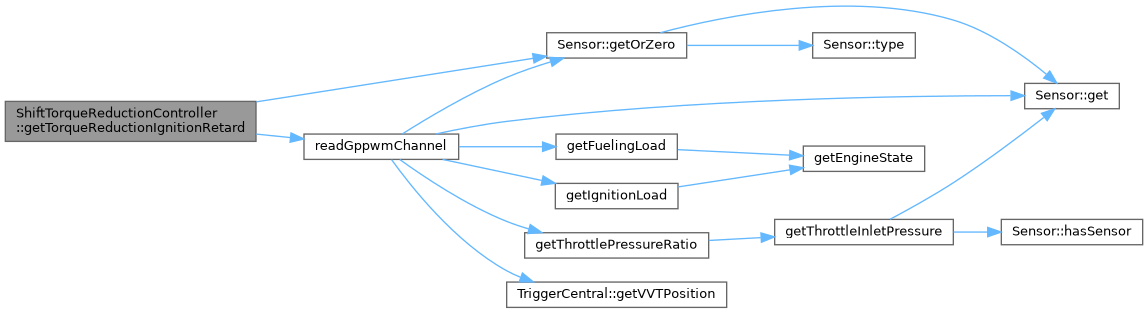
| float | getTorqueReductionIgnitionRetard () |
Private Member Functions | |
| void | updateTriggerPinState () |
| void | updateTriggerPinState (switch_input_pin_e pin, pin_input_mode_e mode, const bool invertPhysicalPin, bool invalidPinState) |
| void | updateTimeConditionSatisfied () |
| void | updateRpmConditionSatisfied () |
| void | updateAppConditionSatisfied () |
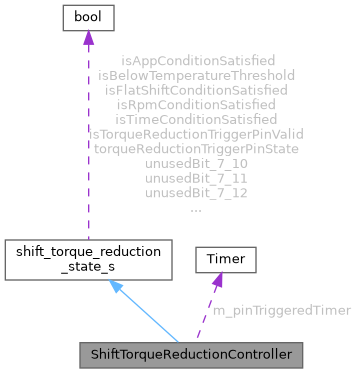
Private Attributes | |
| Timer | m_pinTriggeredTimer |
 Data Fields inherited from
Data Fields inherited from Detailed Description
Definition at line 9 of file shift_torque_reduction_controller.h.
Member Function Documentation
◆ getSparkSkipRatio()
| float ShiftTorqueReductionController::getSparkSkipRatio | ( | ) |
Definition at line 29 of file shift_torque_reduction_controller.cpp.
Referenced by EngineState::updateSparkSkip().

◆ getTorqueReductionIgnitionRetard()
| float ShiftTorqueReductionController::getTorqueReductionIgnitionRetard | ( | ) |
Definition at line 159 of file shift_torque_reduction_controller.cpp.
Referenced by getRunningAdvance().

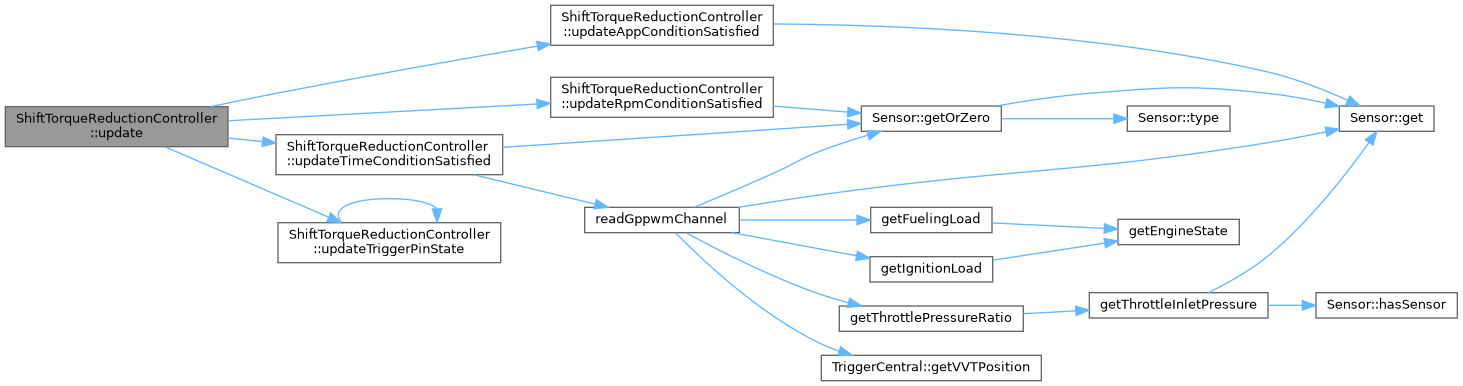
◆ update()
| void ShiftTorqueReductionController::update | ( | ) |
Definition at line 17 of file shift_torque_reduction_controller.cpp.
Referenced by EngineState::periodicFastCallback().

◆ updateAppConditionSatisfied()
|
private |
Definition at line 149 of file shift_torque_reduction_controller.cpp.
Referenced by update().


◆ updateRpmConditionSatisfied()
|
private |
Definition at line 144 of file shift_torque_reduction_controller.cpp.
Referenced by update().


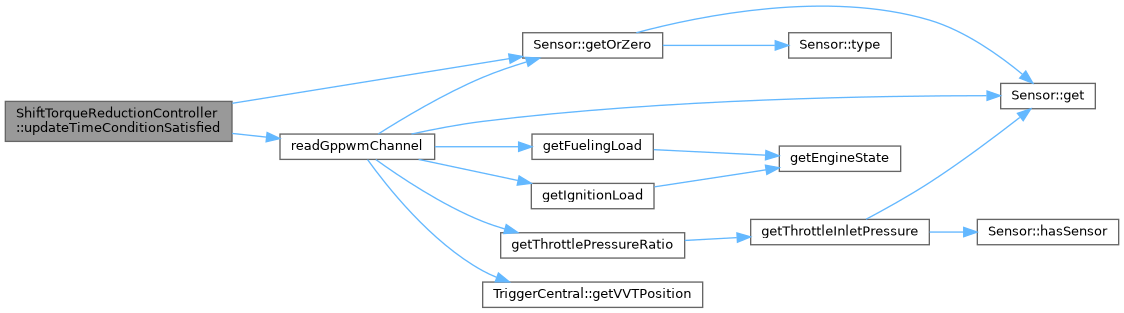
◆ updateTimeConditionSatisfied()
|
private |
Definition at line 125 of file shift_torque_reduction_controller.cpp.
Referenced by update().

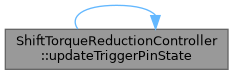
◆ updateTriggerPinState() [1/2]
|
private |
Definition at line 45 of file shift_torque_reduction_controller.cpp.
Referenced by update(), and updateTriggerPinState().

◆ updateTriggerPinState() [2/2]
|
private |
Definition at line 97 of file shift_torque_reduction_controller.cpp.
Field Documentation
◆ m_pinTriggeredTimer
|
private |
Definition at line 25 of file shift_torque_reduction_controller.h.
Referenced by updateTimeConditionSatisfied(), and updateTriggerPinState().
The documentation for this class was generated from the following files:
- controllers/algo/shift_torque_reduction_controller.h
- controllers/algo/shift_torque_reduction_controller.cpp