Detailed Description
- Date
- Jul 27, 2014
Definition in file mpu_util.cpp.
Variables | |
| bool | isSpiInitialized [SPI_TOTAL_COUNT+1] = { true, false, false, false, false, false, false } |
Function Documentation
◆ _unhandled_exception()
| void _unhandled_exception | ( | void | ) |
Definition at line 36 of file mpu_util.cpp.

◆ baseMCUInit()
| void baseMCUInit | ( | ) |
Definition at line 33 of file mpu_util.cpp.
◆ BOR_Get()
| BOR_Level_t BOR_Get | ( | void | ) |
Definition at line 183 of file mpu_util.cpp.
◆ BOR_Set()
| BOR_Result_t BOR_Set | ( | BOR_Level_t | BORValue | ) |
Definition at line 187 of file mpu_util.cpp.
◆ BusFaultVector()
| void BusFaultVector | ( | void | ) |

◆ canHwInfo()
| void canHwInfo | ( | CANDriver * | cand | ) |
Definition at line 225 of file mpu_util.cpp.
◆ canHwRecover()
| void canHwRecover | ( | const size_t | busIndex, |
| CANDriver * | cand | ||
| ) |
Definition at line 231 of file mpu_util.cpp.
◆ DebugMonitorVector()
| void DebugMonitorVector | ( | void | ) |

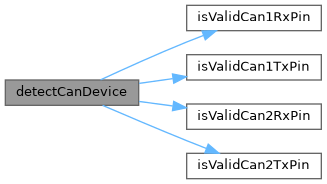
◆ detectCanDevice()
| CANDriver * detectCanDevice | ( | brain_pin_e | pinRx, |
| brain_pin_e | pinTx | ||
| ) |
Definition at line 217 of file mpu_util.cpp.
◆ enableFastAdcChannel()
| AdcToken enableFastAdcChannel | ( | const char * | msg, |
| adc_channel_e | channel | ||
| ) |
Definition at line 289 of file mpu_util.cpp.
◆ flashSectorSize()
| size_t flashSectorSize | ( | flashsector_t | sector | ) |
Get the size of sector.
- Returns
sectorsize in bytes.
Definition at line 242 of file mpu_util.cpp.
Referenced by flashSectorSize().

◆ getFastAdc()
| adcsample_t getFastAdc | ( | AdcToken | token | ) |
Definition at line 298 of file mpu_util.cpp.
◆ getFlashAddrFirstCopy()
| uintptr_t getFlashAddrFirstCopy | ( | void | ) |
Definition at line 253 of file mpu_util.cpp.
Referenced by getFlashAddrSecondCopy().

◆ getFlashAddrSecondCopy()
| uintptr_t getFlashAddrSecondCopy | ( | void | ) |
Definition at line 257 of file mpu_util.cpp.
◆ getMCUResetCause() [1/2]
| Reset_Cause_t getMCUResetCause | ( | ) |
Definition at line 307 of file mpu_util.cpp.
◆ getMCUResetCause() [2/2]
| const char * getMCUResetCause | ( | Reset_Cause_t | cause | ) |
Definition at line 311 of file mpu_util.cpp.
◆ getMcuTemperature()
| float getMcuTemperature | ( | ) |
Definition at line 269 of file mpu_util.cpp.
Referenced by adcOnchipSlowUpdate().

◆ getMcuVbatVoltage()
| float getMcuVbatVoltage | ( | ) |
Definition at line 279 of file mpu_util.cpp.
Referenced by updateMiscSensors().

◆ getMcuVrefVoltage()
| float getMcuVrefVoltage | ( | ) |
Definition at line 274 of file mpu_util.cpp.
Referenced by adcOnchipSlowUpdate().

◆ getSpiAf()
|
static |
Definition at line 71 of file mpu_util.cpp.
Referenced by initSpiModule().

◆ HardFaultVector()
| void HardFaultVector | ( | void | ) |
Definition at line 62 of file mpu_util.cpp.
◆ initSpiCs()
| void initSpiCs | ( | SPIConfig * | spiConfig, |
| brain_pin_e | csPin | ||
| ) |
Definition at line 155 of file mpu_util.cpp.
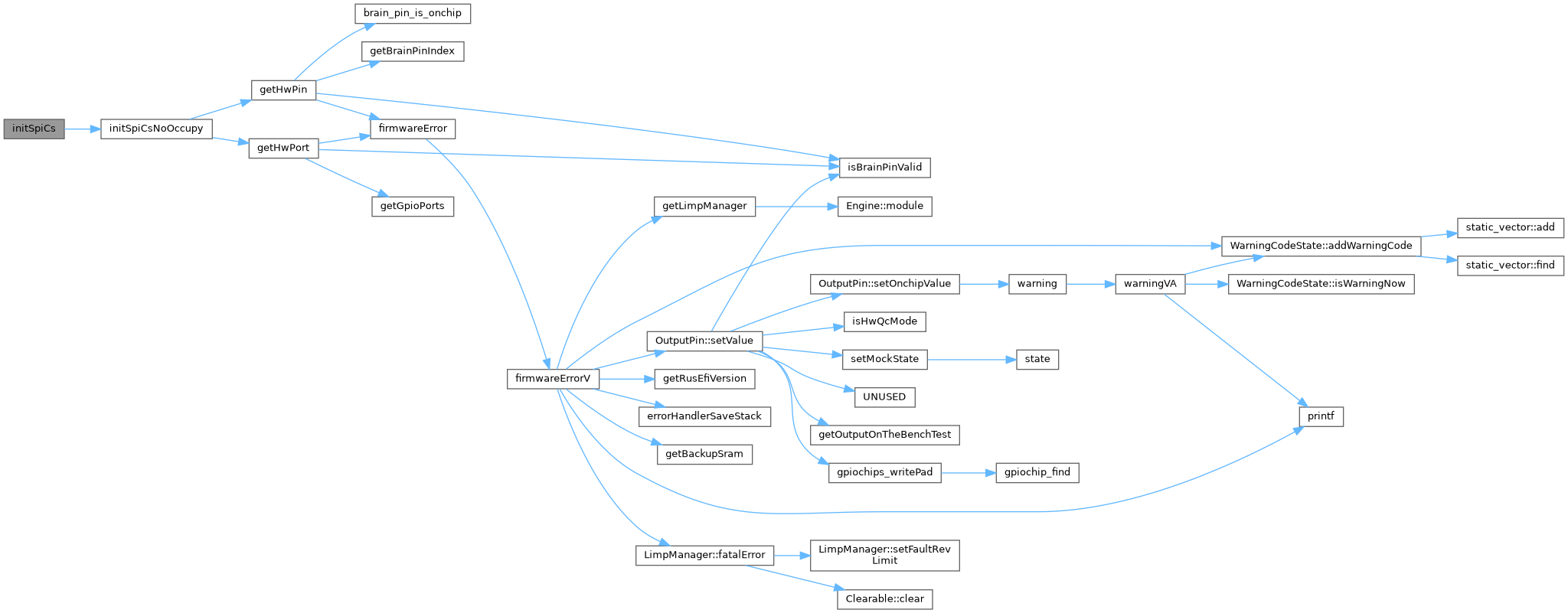
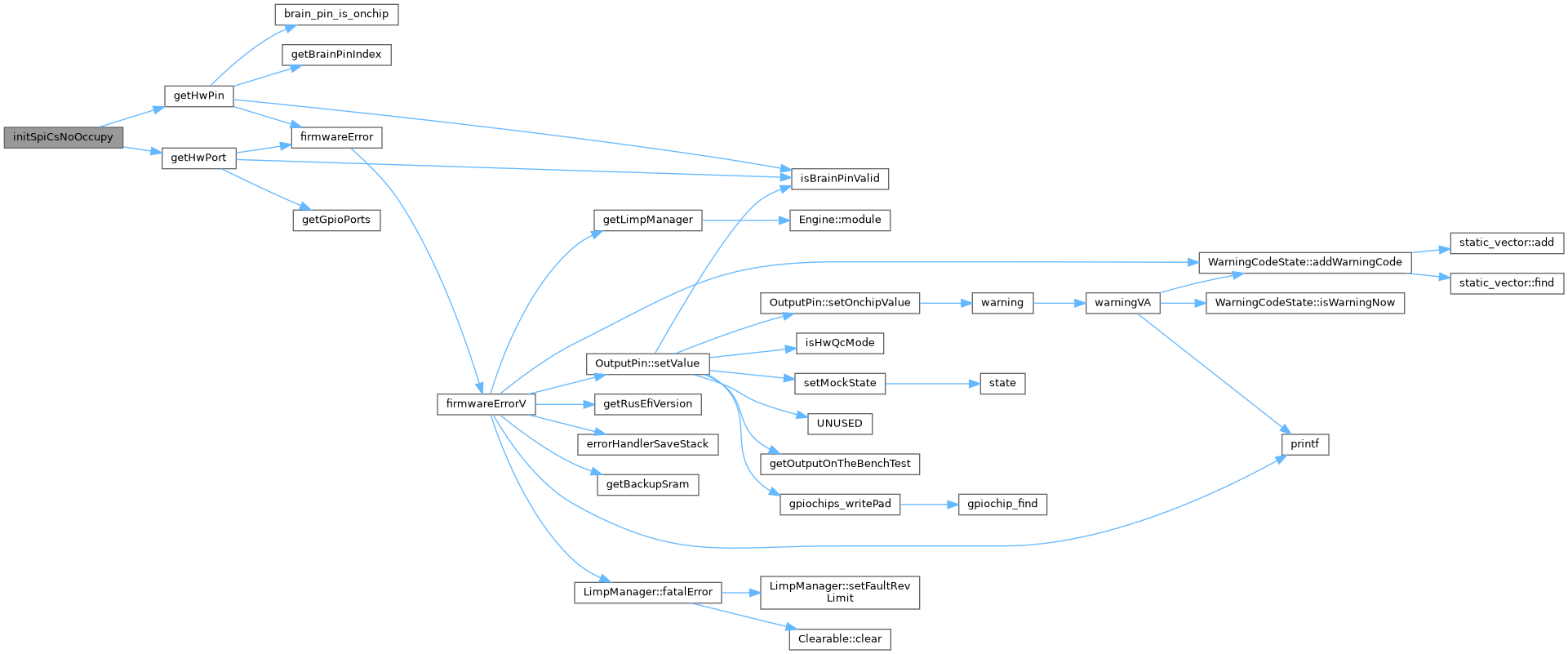
◆ initSpiCsNoOccupy()
| void initSpiCsNoOccupy | ( | SPIConfig * | spiConfig, |
| brain_pin_e | csPin | ||
| ) |
Definition at line 148 of file mpu_util.cpp.
Referenced by initSpiCs().

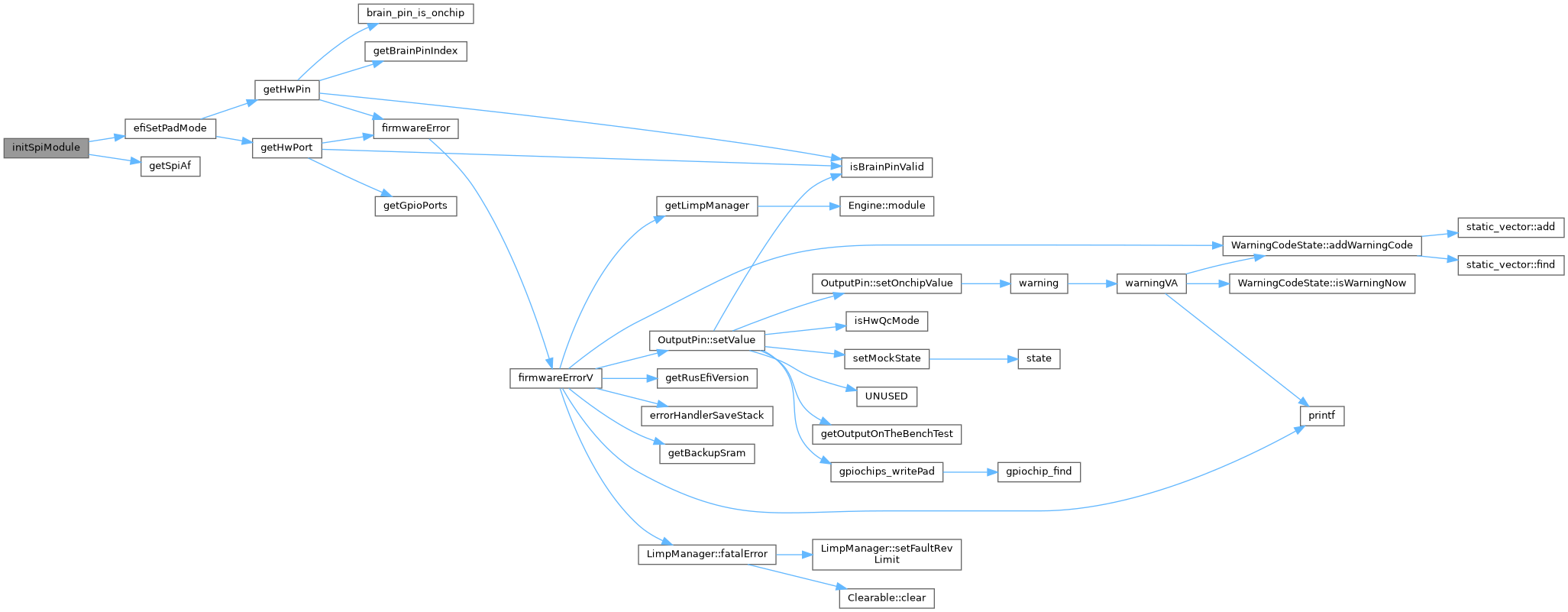
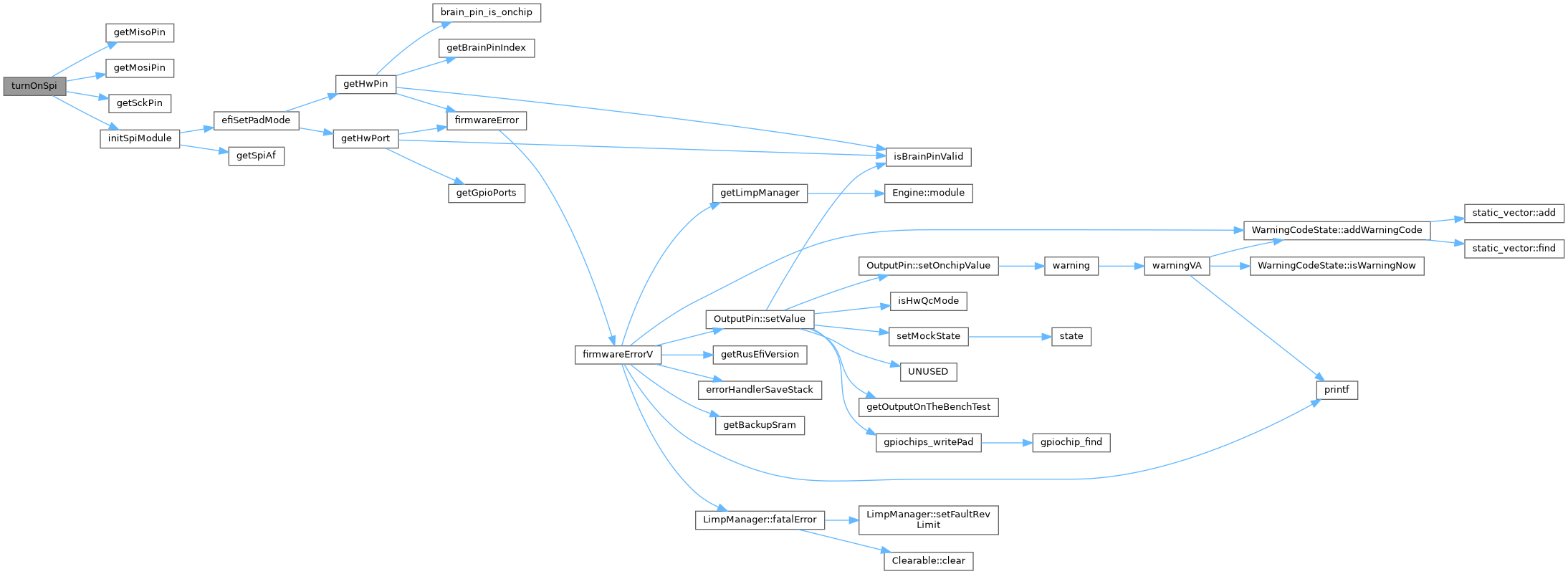
◆ initSpiModule()
| void initSpiModule | ( | SPIDriver * | driver, |
| brain_pin_e | sck, | ||
| brain_pin_e | miso, | ||
| brain_pin_e | mosi, | ||
| int | sckMode, | ||
| int | mosiMode, | ||
| int | misoMode | ||
| ) |
See https://github.com/rusefi/rusefi/pull/664/
Info on the silicon defect can be found in this document, section 2.5.2: https://www.st.com/content/ccc/resource/technical/document/errata_sheet/0a/98/58/84/86/b6/47/a2/DM00037591.pdf/files/DM00037591.pdf/jcr:content/translations/en.DM00037591.pdf
Definition at line 130 of file mpu_util.cpp.
Referenced by turnOnSpi().

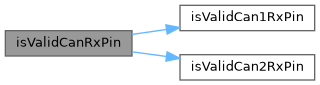
◆ isValidCan1RxPin()
|
static |
Definition at line 193 of file mpu_util.cpp.
Referenced by detectCanDevice(), and isValidCanRxPin().
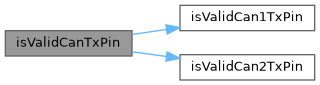
◆ isValidCan1TxPin()
|
static |
Definition at line 197 of file mpu_util.cpp.
Referenced by detectCanDevice(), and isValidCanTxPin().
◆ isValidCan2RxPin()
|
static |
Definition at line 201 of file mpu_util.cpp.
Referenced by detectCanDevice(), and isValidCanRxPin().
◆ isValidCan2TxPin()
|
static |
Definition at line 205 of file mpu_util.cpp.
Referenced by detectCanDevice(), and isValidCanTxPin().
◆ isValidCanRxPin()
| bool isValidCanRxPin | ( | brain_pin_e | pin | ) |
◆ isValidCanTxPin()
| bool isValidCanTxPin | ( | brain_pin_e | pin | ) |
◆ mcuCanFlashWhileRunning()
| bool mcuCanFlashWhileRunning | ( | ) |
Definition at line 238 of file mpu_util.cpp.
◆ portInitAdc()
| void portInitAdc | ( | ) |
Definition at line 261 of file mpu_util.cpp.
Referenced by initAdcInputs().

◆ readSlowAnalogInputs()
| bool readSlowAnalogInputs | ( | adcsample_t * | convertedSamples | ) |
Definition at line 284 of file mpu_util.cpp.
Referenced by adcOnchipSlowUpdate().

◆ setWatchdogResetPeriod()
| void setWatchdogResetPeriod | ( | int | resetMs | ) |
Definition at line 30 of file mpu_util.cpp.
◆ spiCalcClockDiv()
| int spiCalcClockDiv | ( | SPIDriver * | spip, |
| SPIConfig * | spiConfig, | ||
| unsigned int | clk | ||
| ) |
Definition at line 175 of file mpu_util.cpp.
◆ spiGetBaseClock()
| int spiGetBaseClock | ( | SPIDriver * | spip | ) |
Definition at line 169 of file mpu_util.cpp.
◆ startWatchdog()
| void startWatchdog | ( | int | timeoutMs | ) |
Definition at line 24 of file mpu_util.cpp.
◆ tryResetWatchdog()
| void tryResetWatchdog | ( | ) |
Definition at line 27 of file mpu_util.cpp.
◆ turnOnSpi()
| void turnOnSpi | ( | spi_device_e | device | ) |
Definition at line 90 of file mpu_util.cpp.
◆ UsageFaultVector()
| void UsageFaultVector | ( | void | ) |

Variable Documentation
◆ isSpiInitialized
| bool isSpiInitialized[SPI_TOTAL_COUNT+1] = { true, false, false, false, false, false, false } |
Definition at line 69 of file mpu_util.cpp.
Referenced by turnOnSpi().