Detailed Description
- Date
- Jul 27, 2014
Definition in file mpu_util.h.
Data Structures | |
| struct | hardware_pwm |
Enumerations | |
| enum | BOR_Result_t { BOR_Result_Ok = 0x00 , BOR_Result_Error } |
| enum | Reset_Cause_t { Reset_Cause_Unknown = 0 , Reset_Cause_IWatchdog , Reset_Cause_WWatchdog , Reset_Cause_Soft_Reset , Reset_Cause_NRST_Pin , Reset_Cause_POR , Reset_Cause_Illegal_Mode , Reset_Cause_BOR , Reset_Cause_Firewall , Reset_Cause_Option_Byte } |
Variables | |
| SPIConfig | mmc_hs_spicfg |
| SPIConfig | mmc_ls_spicfg |
Enumeration Type Documentation
◆ BOR_Result_t
| enum BOR_Result_t |
| Enumerator | |
|---|---|
| BOR_Result_Ok | |
| BOR_Result_Error | |
Definition at line 97 of file mpu_util.h.
◆ Reset_Cause_t
| enum Reset_Cause_t |
Definition at line 106 of file mpu_util.h.
Function Documentation
◆ adcIsMuxedInput()
| bool adcIsMuxedInput | ( | adc_channel_e | hwChannel | ) |
Definition at line 150 of file cypress_common.cpp.
Referenced by adcMuxedGetParent().


◆ adcMuxedGetParent()
| adc_channel_e adcMuxedGetParent | ( | adc_channel_e | hwChannel | ) |
Definition at line 154 of file cypress_common.cpp.
Referenced by getAdcChannelBrainPin().


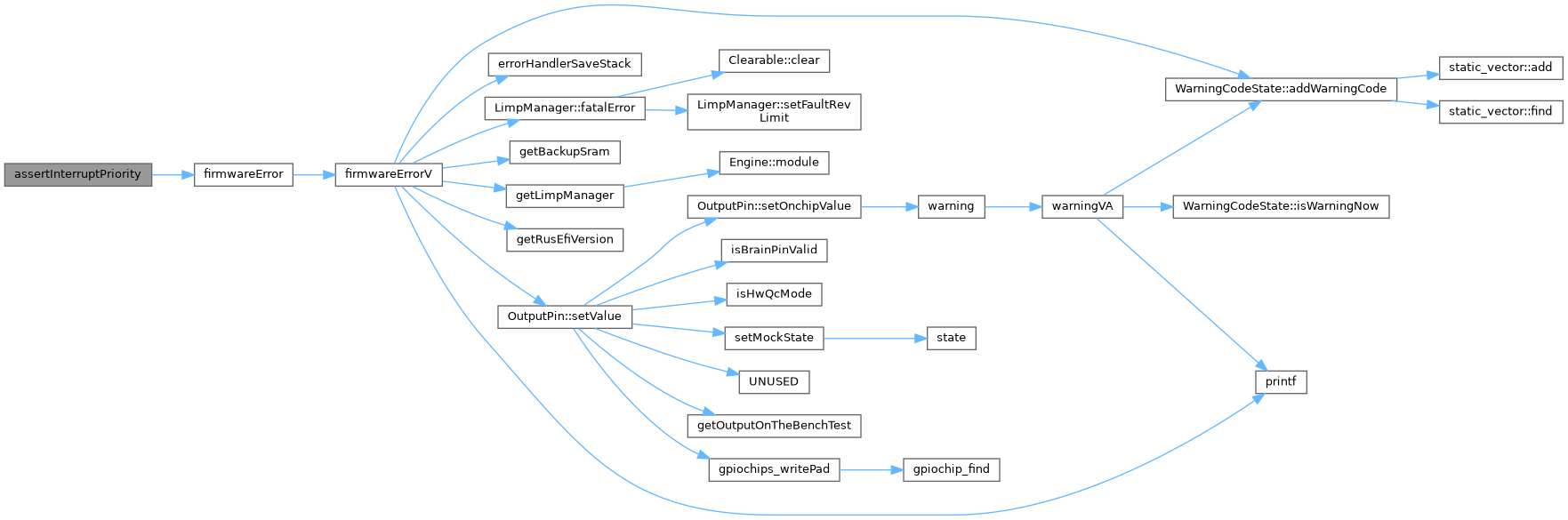
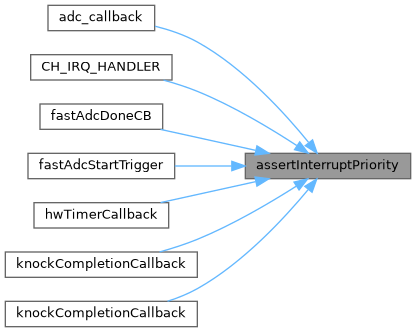
◆ assertInterruptPriority()
| void assertInterruptPriority | ( | const char * | func, |
| uint8_t | expectedPrio | ||
| ) |
Definition at line 284 of file stm32_common.cpp.
Referenced by adc_callback(), CH_IRQ_HANDLER(), fastAdcDoneCB(), fastAdcStartTrigger(), hwTimerCallback(), knockCompletionCallback(), and knockCompletionCallback().
◆ at32GetMcuType()
Definition at line 12 of file at32_common.cpp.
Referenced by sayHello().


◆ at32GetRamSizeKb()
| int at32GetRamSizeKb | ( | void | ) |
Definition at line 70 of file at32_common.cpp.
Referenced by sayHello().

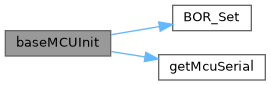
◆ baseMCUInit()
| void baseMCUInit | ( | ) |
Definition at line 146 of file at32_common.cpp.
Referenced by main().

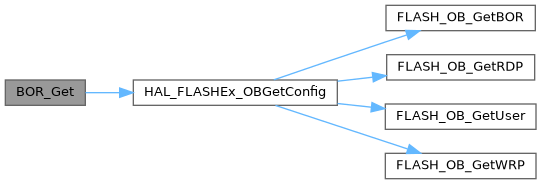
◆ BOR_Get()
| BOR_Level_t BOR_Get | ( | void | ) |
Definition at line 126 of file at32_common.cpp.
Referenced by BOR_Set().

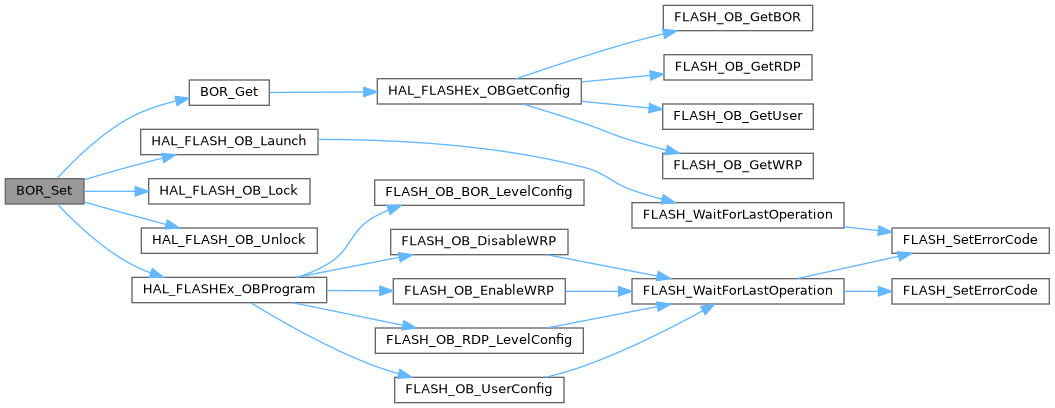
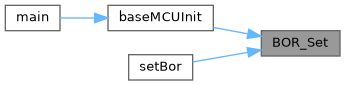
◆ BOR_Set()
| BOR_Result_t BOR_Set | ( | BOR_Level_t | BORValue | ) |
Definition at line 132 of file at32_common.cpp.
Referenced by baseMCUInit(), and setBor().
◆ BusFaultVector()
| void BusFaultVector | ( | void | ) |
Definition at line 56 of file mpu_util.cpp.

◆ canHwInfo()
| void canHwInfo | ( | CANDriver * | cand | ) |
Definition at line 129 of file at32_can.cpp.
Referenced by canInfo().


◆ canHwRecover()
| void canHwRecover | ( | const size_t | busIndex, |
| CANDriver * | cand | ||
| ) |
Definition at line 135 of file at32_can.cpp.
◆ causeHardFault()
| void causeHardFault | ( | ) |
Definition at line 16 of file arm_common.cpp.
Referenced by errorHandlerInit().

◆ DebugMonitorVector()
| void DebugMonitorVector | ( | void | ) |

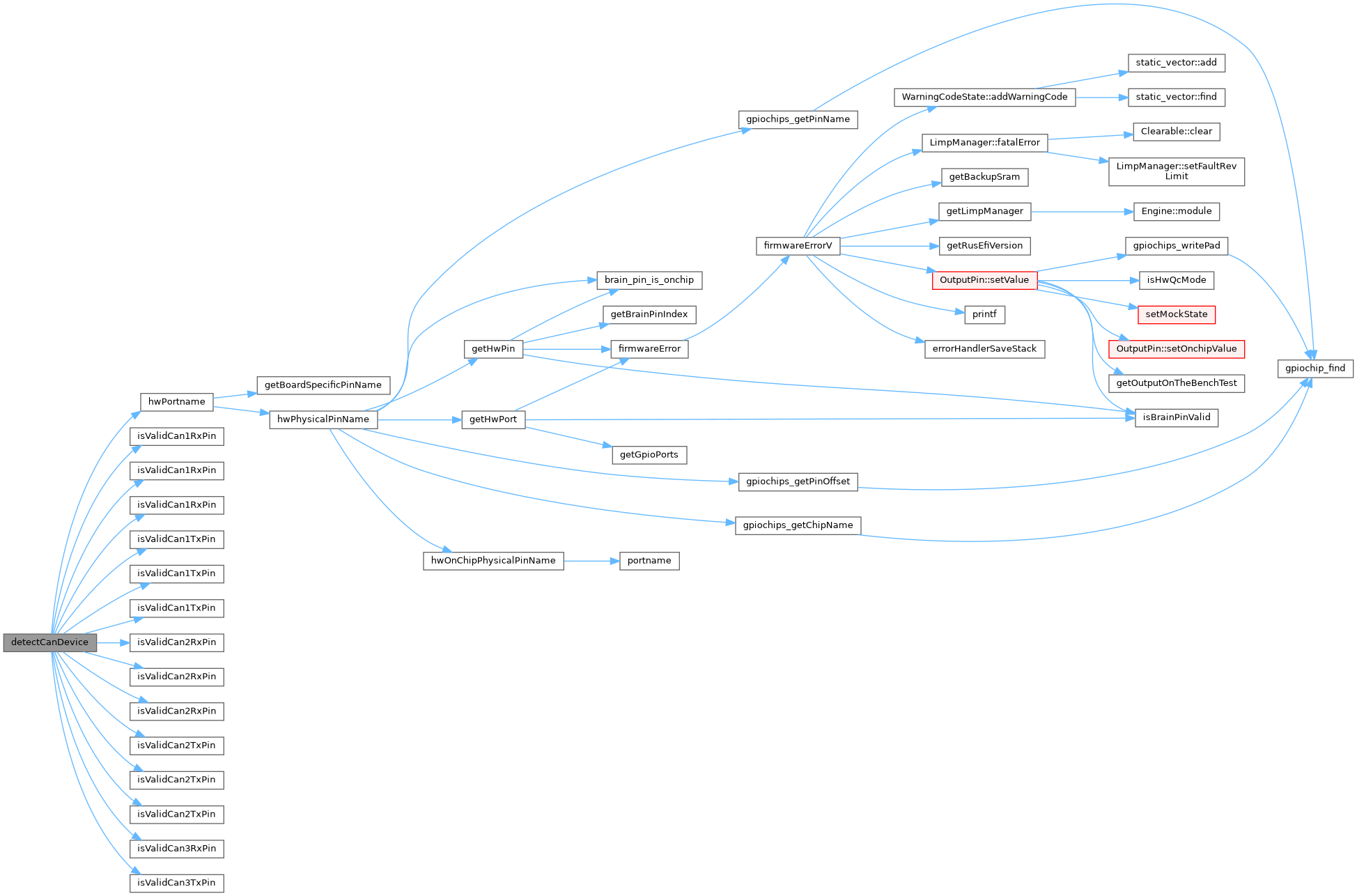
◆ detectCanDevice()
| CANDriver * detectCanDevice | ( | brain_pin_e | pinRx, |
| brain_pin_e | pinTx | ||
| ) |
Definition at line 93 of file at32_can.cpp.
Referenced by getCanDevice().

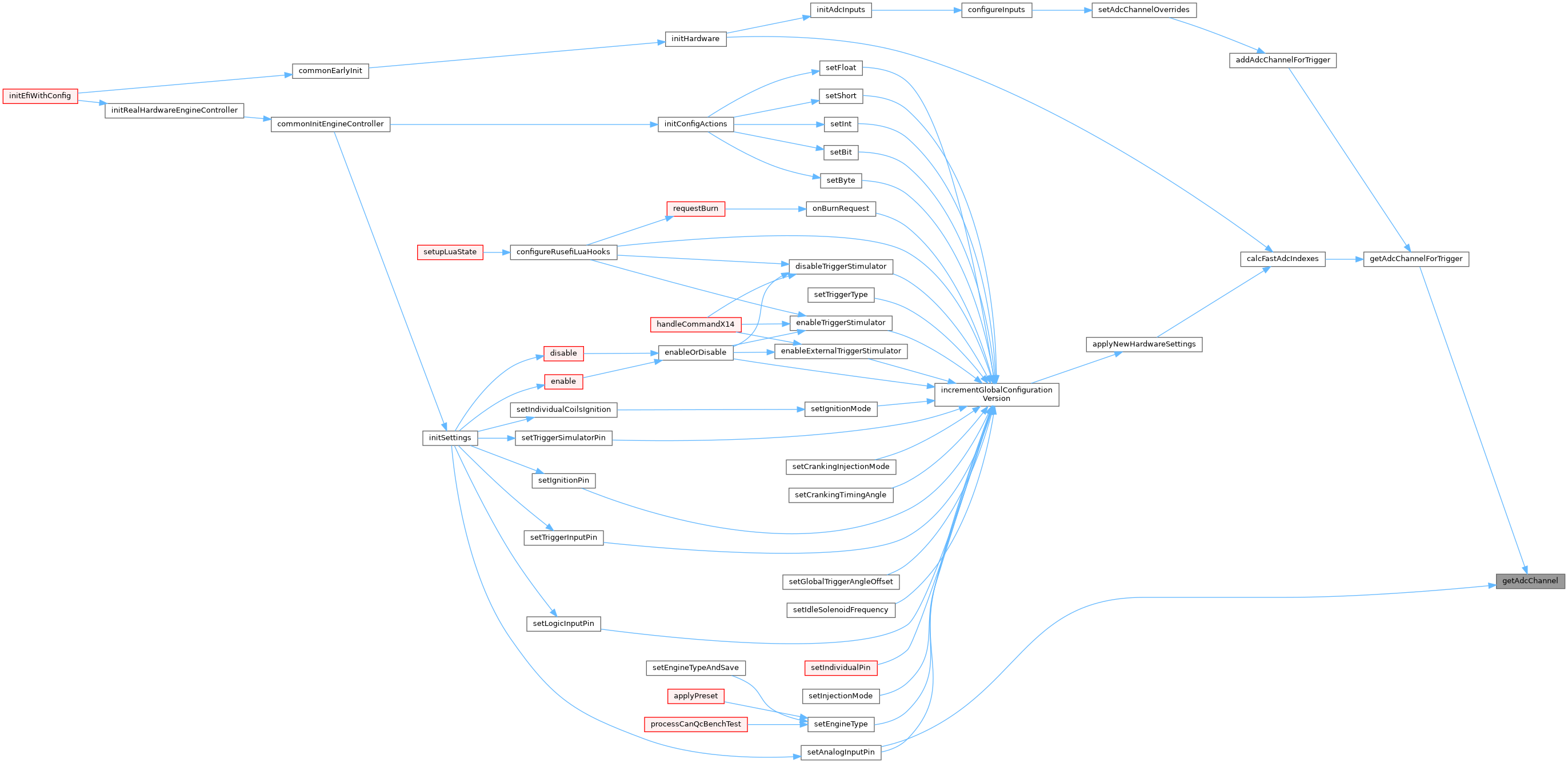
◆ getAdcChannel()
| adc_channel_e getAdcChannel | ( | brain_pin_e | pin | ) |
Definition at line 103 of file cypress_common.cpp.
Referenced by getAdcChannelForTrigger(), and setAnalogInputPin().
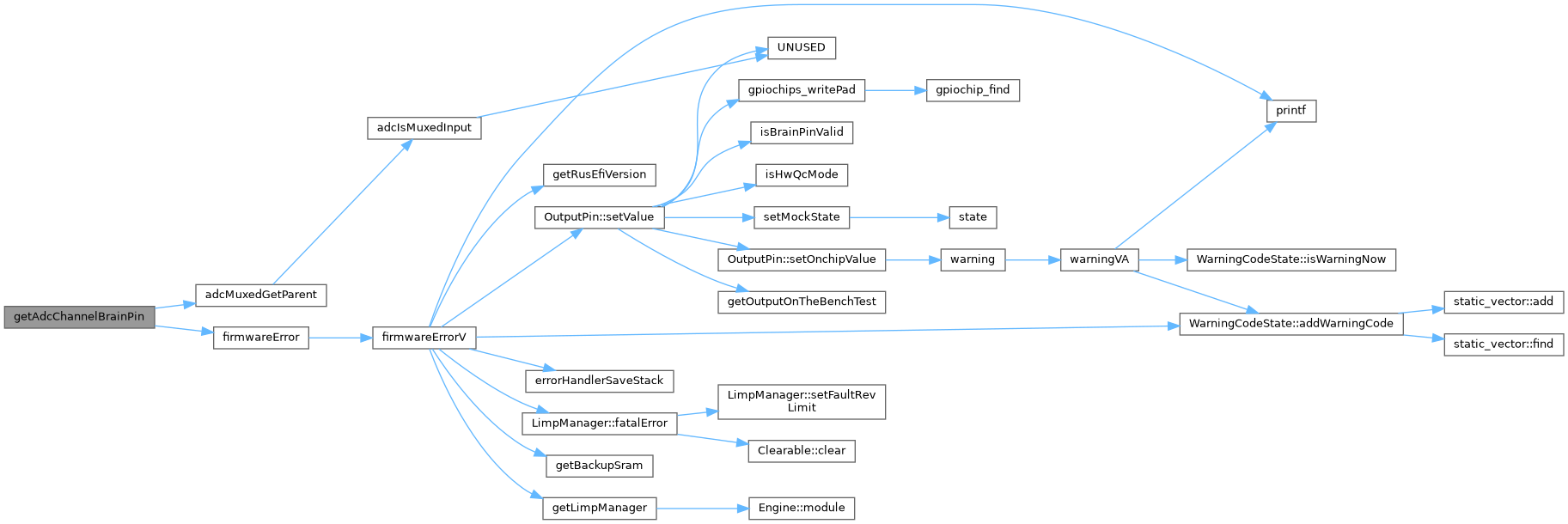
◆ getAdcChannelBrainPin()
| brain_pin_e getAdcChannelBrainPin | ( | const char * | msg, |
| adc_channel_e | hwChannel | ||
| ) |
Definition at line 30 of file cypress_common.cpp.
Referenced by deInitIfValid(), getAdcChannelPin(), getAdcChannelPort(), and initIfValid().
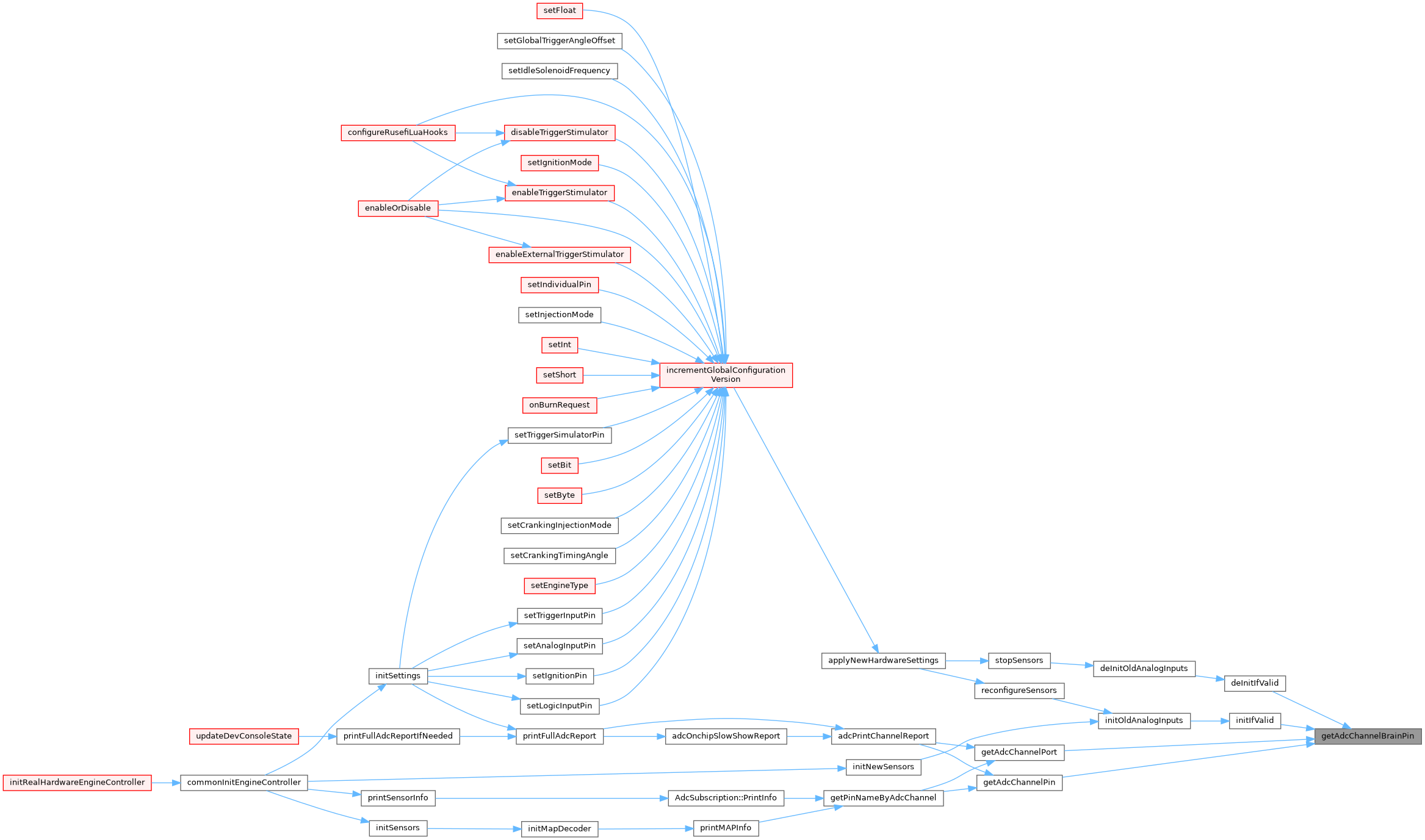
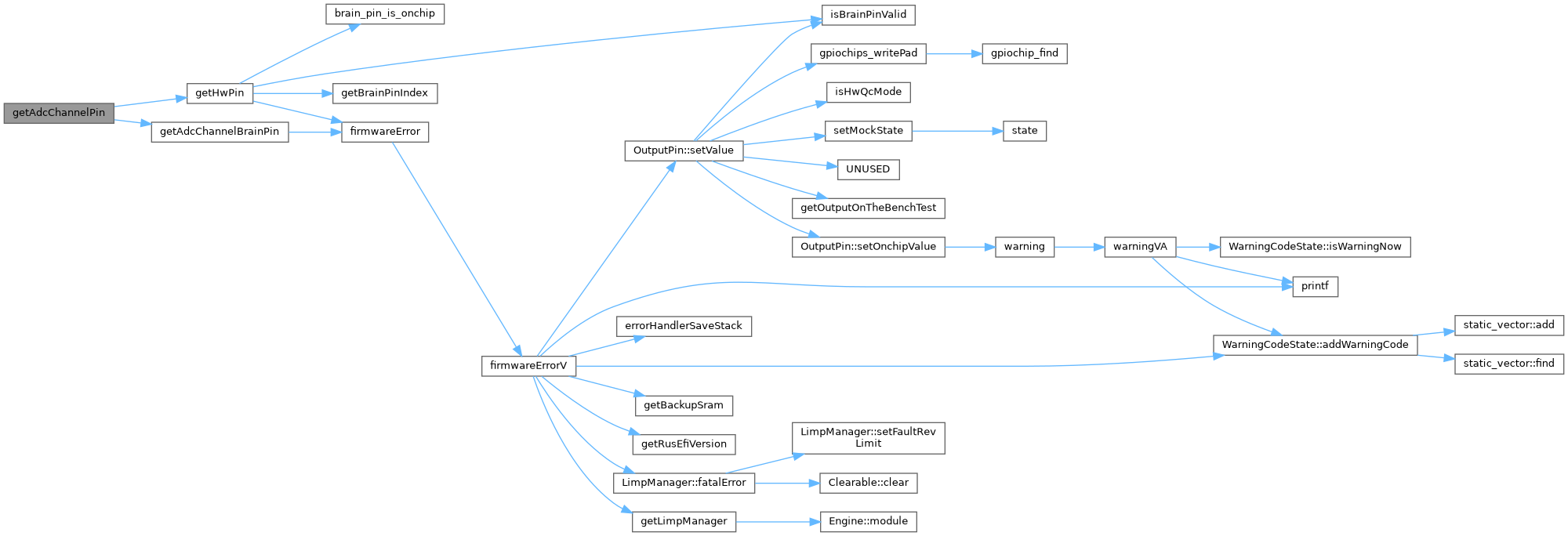
◆ getAdcChannelPin()
| int getAdcChannelPin | ( | adc_channel_e | hwChannel | ) |
Definition at line 178 of file cypress_common.cpp.
Referenced by adcPrintChannelReport(), and getPinNameByAdcChannel().

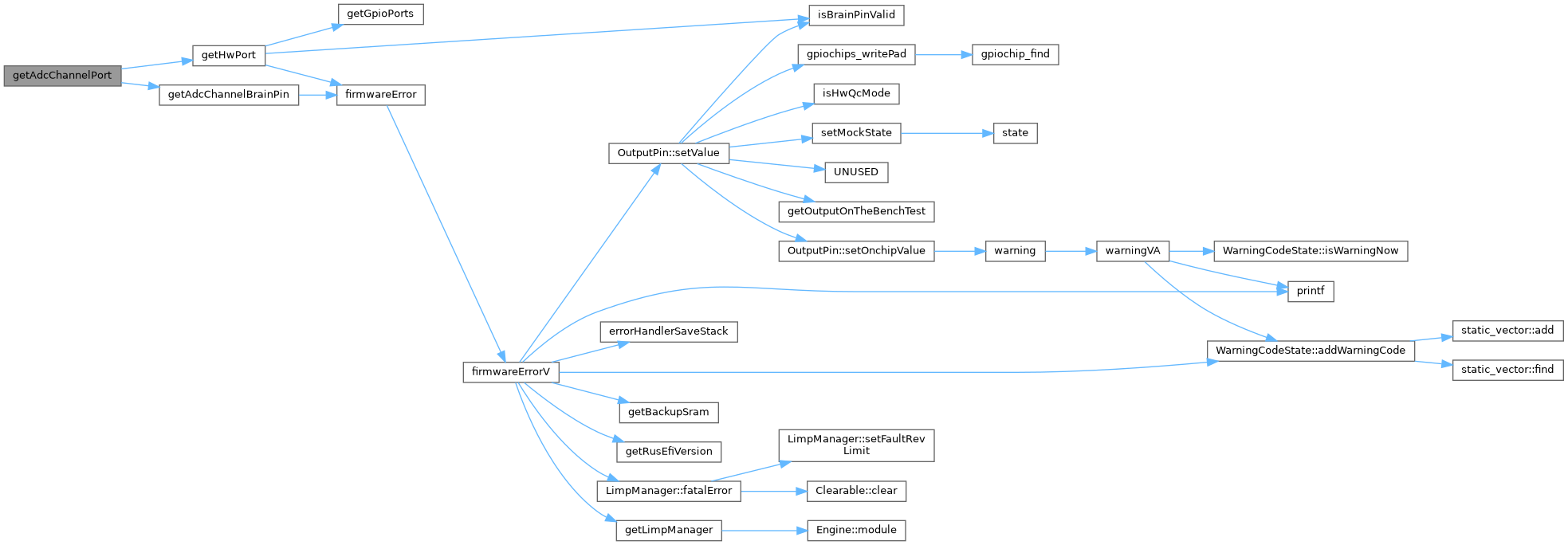
◆ getAdcChannelPort()
| ioportid_t getAdcChannelPort | ( | const char * | msg, |
| adc_channel_e | hwChannel | ||
| ) |
Definition at line 173 of file cypress_common.cpp.
Referenced by adcPrintChannelReport(), and getPinNameByAdcChannel().

◆ getAdcInternalChannel()
| int getAdcInternalChannel | ( | ADC_TypeDef * | adc, |
| adc_channel_e | hwChannel | ||
| ) |
Definition at line 159 of file cypress_common.cpp.
◆ getHwChannelForAdcInput()
| adc_channel_e getHwChannelForAdcInput | ( | ADC_TypeDef * | adc, |
| size_t | hwIndex | ||
| ) |
Definition at line 165 of file cypress_common.cpp.
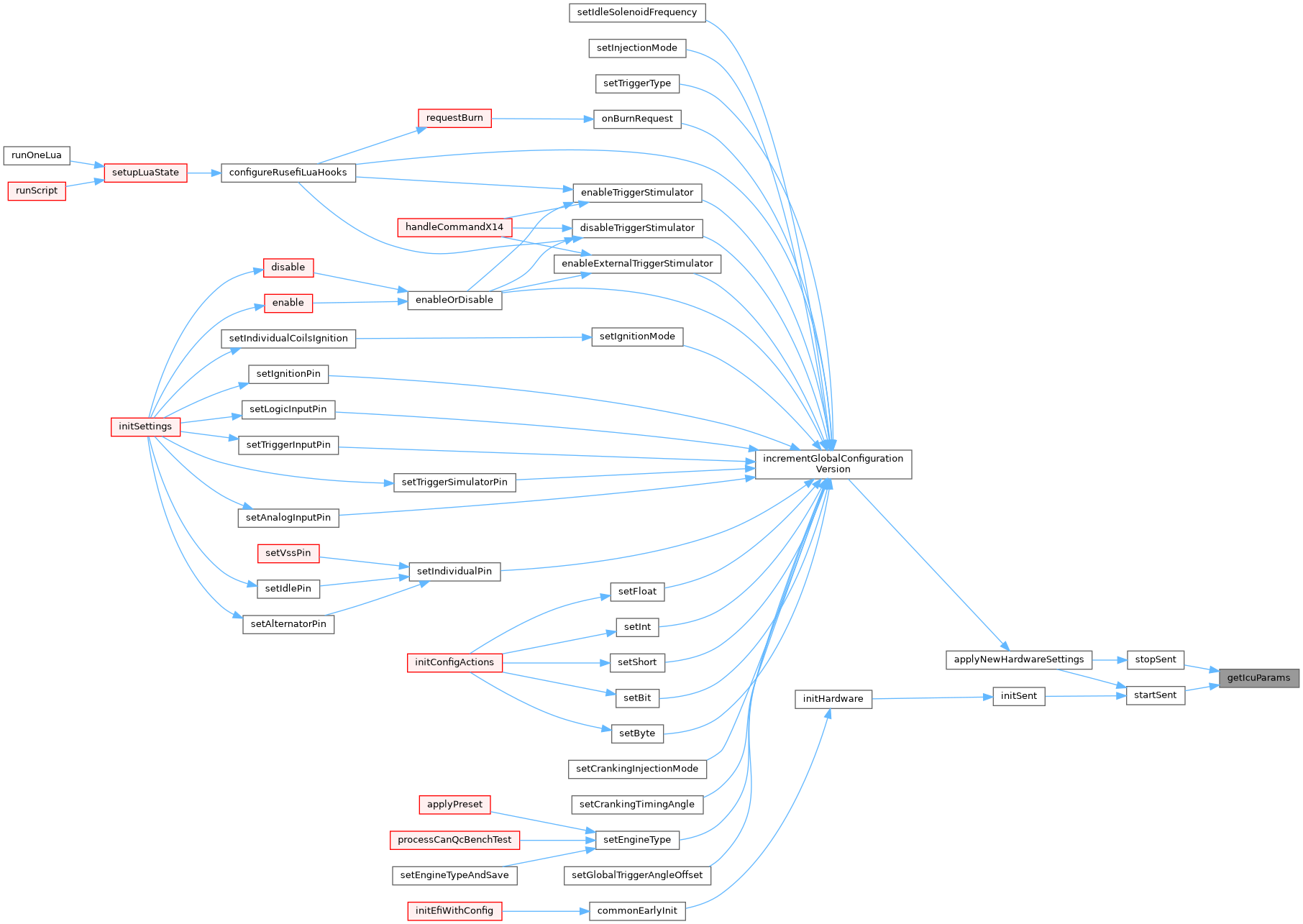
◆ getIcuParams()
| bool getIcuParams | ( | brain_pin_e | hwPin, |
| iomode_t * | af_ptr, | ||
| ICUDriver ** | icu_ptr, | ||
| icuchannel_t * | channel_ptr, | ||
| uint32_t * | clock_ptr | ||
| ) |
ChibiOS limitation is that only channels #1 and #2 could be used for input capture Could this be unified with getConfigForPin() method?
Definition at line 122 of file stm32_icu.cpp.
Referenced by startSent(), and stopSent().
◆ getMCUResetCause() [1/2]
| Reset_Cause_t getMCUResetCause | ( | ) |
Definition at line 189 of file at32_common.cpp.
Referenced by checkIfResetLoop(), errorHandlerInit(), and errorHandlerWriteReportFile().

◆ getMCUResetCause() [2/2]
| const char * getMCUResetCause | ( | Reset_Cause_t | cause | ) |
Definition at line 193 of file at32_common.cpp.
◆ getMcuTemperature()
| float getMcuTemperature | ( | ) |
Definition at line 269 of file mpu_util.cpp.
Referenced by adcOnchipSlowUpdate().

◆ getMcuVbatVoltage()
| float getMcuVbatVoltage | ( | ) |
Definition at line 279 of file mpu_util.cpp.
Referenced by updateMiscSensors().


◆ getMcuVrefVoltage()
| float getMcuVrefVoltage | ( | ) |
Definition at line 274 of file mpu_util.cpp.
Referenced by adcOnchipSlowUpdate().

◆ HardFaultVector()
| void HardFaultVector | ( | void | ) |
Definition at line 62 of file mpu_util.cpp.
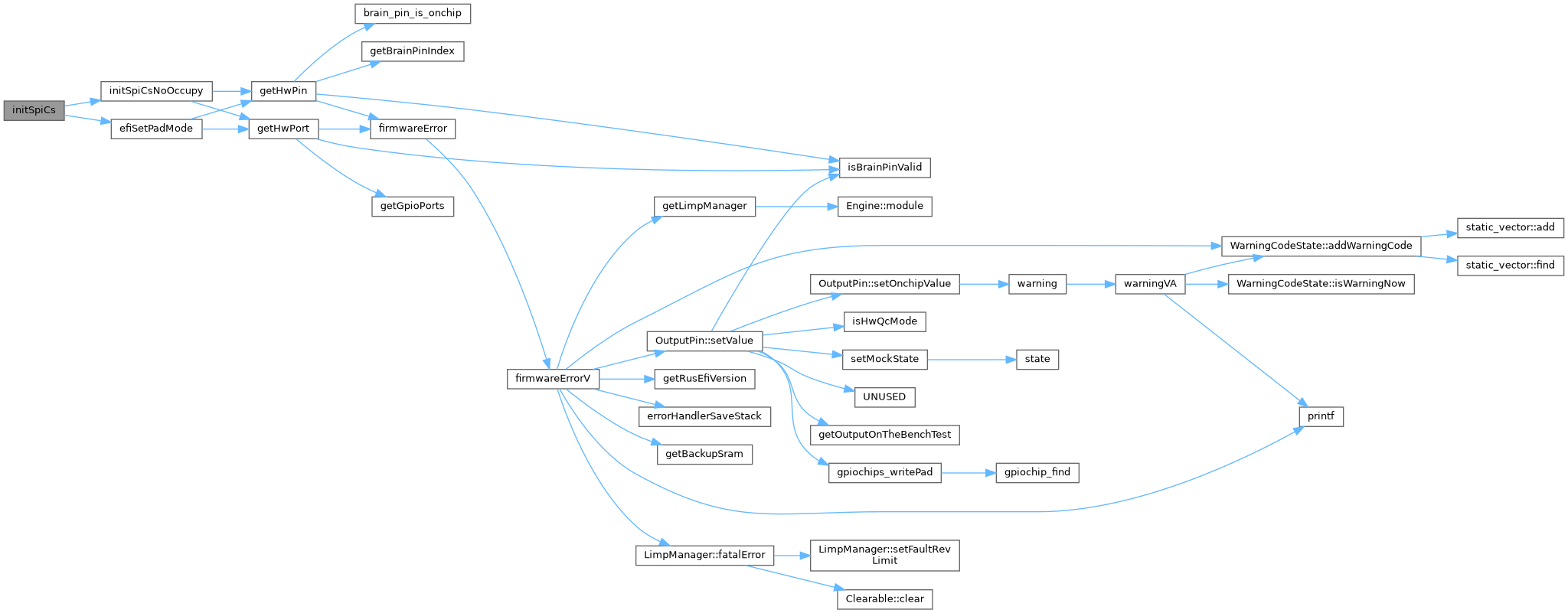
◆ initSpiCs()
| void initSpiCs | ( | SPIConfig * | spiConfig, |
| brain_pin_e | csPin | ||
| ) |
Definition at line 241 of file at32_spi.cpp.
Referenced by initPotentiometer().

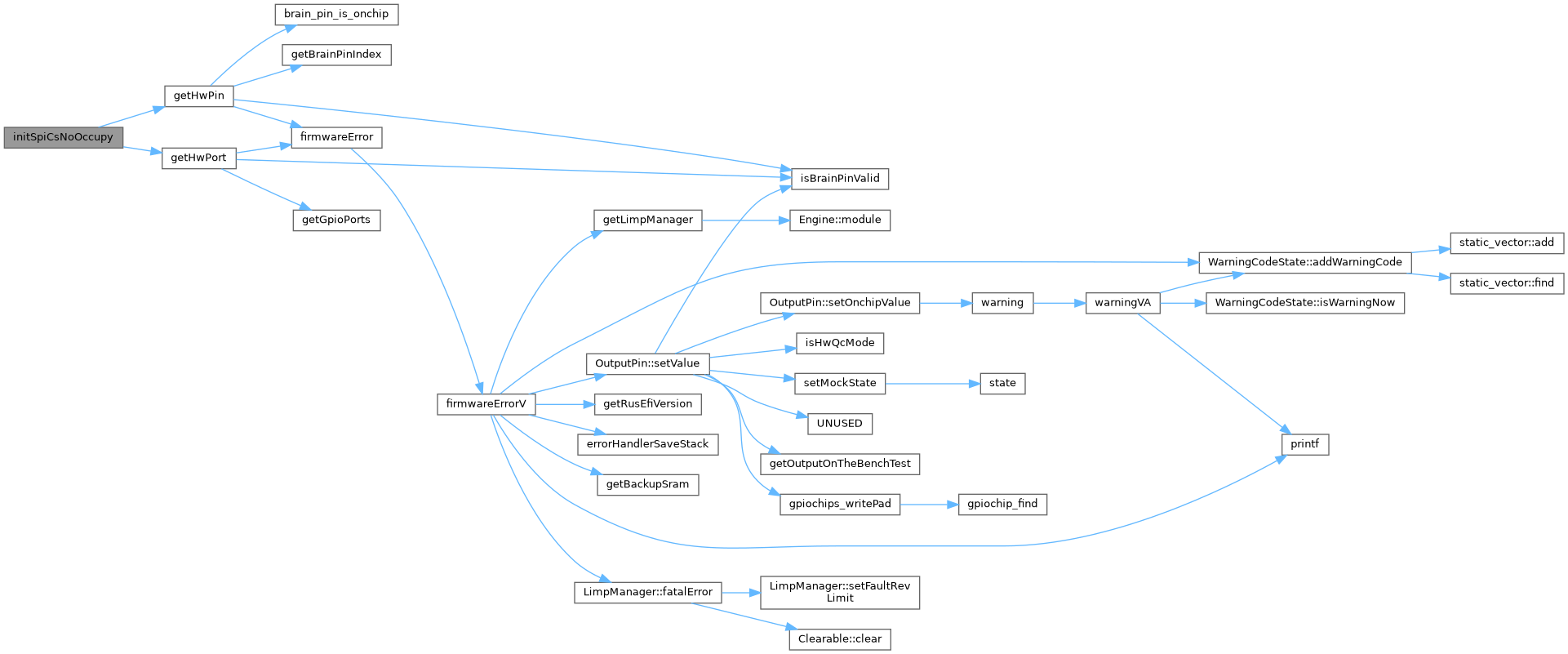
◆ initSpiCsNoOccupy()
| void initSpiCsNoOccupy | ( | SPIConfig * | spiConfig, |
| brain_pin_e | csPin | ||
| ) |
Definition at line 234 of file at32_spi.cpp.
Referenced by initSpiCs().

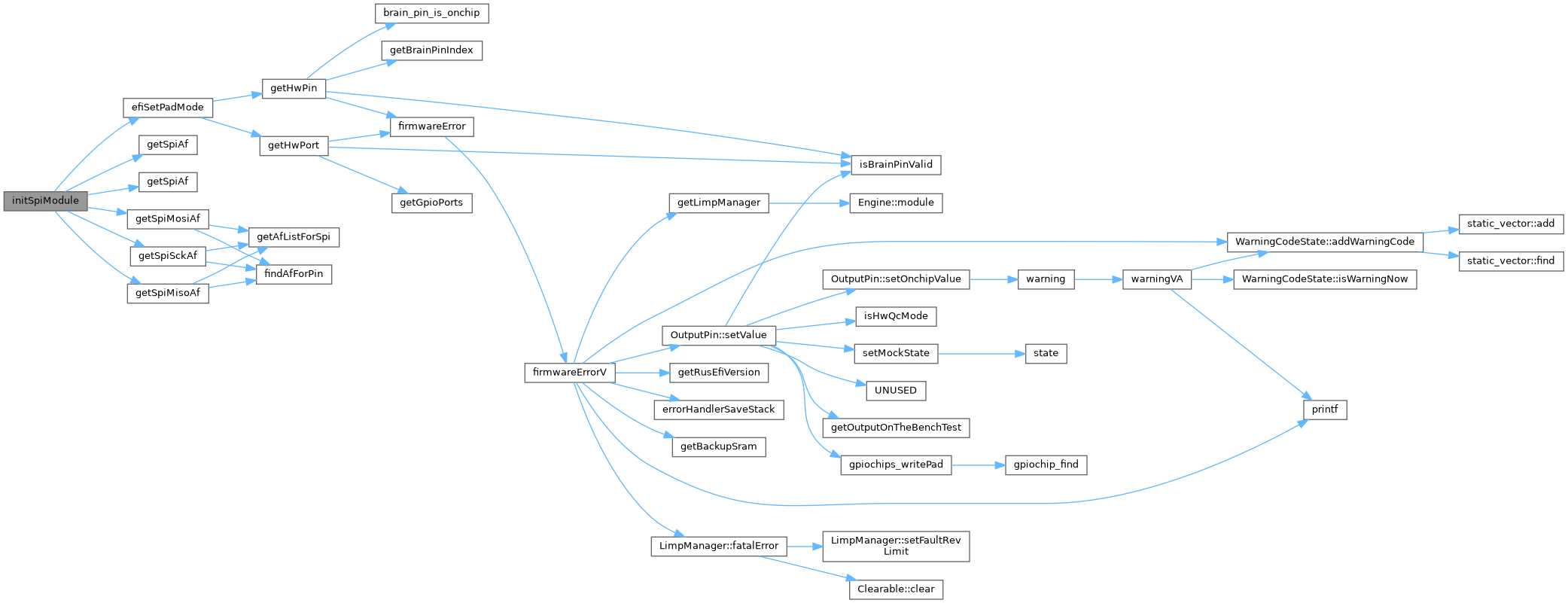
◆ initSpiModule()
| void initSpiModule | ( | SPIDriver * | driver, |
| brain_pin_e | sck, | ||
| brain_pin_e | miso, | ||
| brain_pin_e | mosi, | ||
| int | sckMode, | ||
| int | mosiMode, | ||
| int | misoMode | ||
| ) |
See https://github.com/rusefi/rusefi/pull/664/
Info on the silicon defect can be found in this document, section 2.5.2: https://www.st.com/content/ccc/resource/technical/document/errata_sheet/0a/98/58/84/86/b6/47/a2/DM00037591.pdf/files/DM00037591.pdf/jcr:content/translations/en.DM00037591.pdf
See https://github.com/rusefi/rusefi/pull/664/
Info on the silicon defect can be found in this document, section 2.5.2: https://www.st.com/content/ccc/resource/technical/document/errata_sheet/0a/98/58/84/86/b6/47/a2/DM00037591.pdf/files/DM00037591.pdf/jcr:content/translations/en.DM00037591.pdf
See https://github.com/rusefi/rusefi/pull/664/
Info on the silicon defect can be found in this document, section 2.5.2: https://www.st.com/content/ccc/resource/technical/document/errata_sheet/0a/98/58/84/86/b6/47/a2/DM00037591.pdf/files/DM00037591.pdf/jcr:content/translations/en.DM00037591.pdf
Definition at line 206 of file at32_spi.cpp.
Referenced by turnOnSpi().

◆ isStm32F42x()
| bool isStm32F42x | ( | ) |
Definition at line 156 of file at32_common.cpp.
Referenced by getMcuVbatVoltage(), luaHeapInit(), and sayHello().

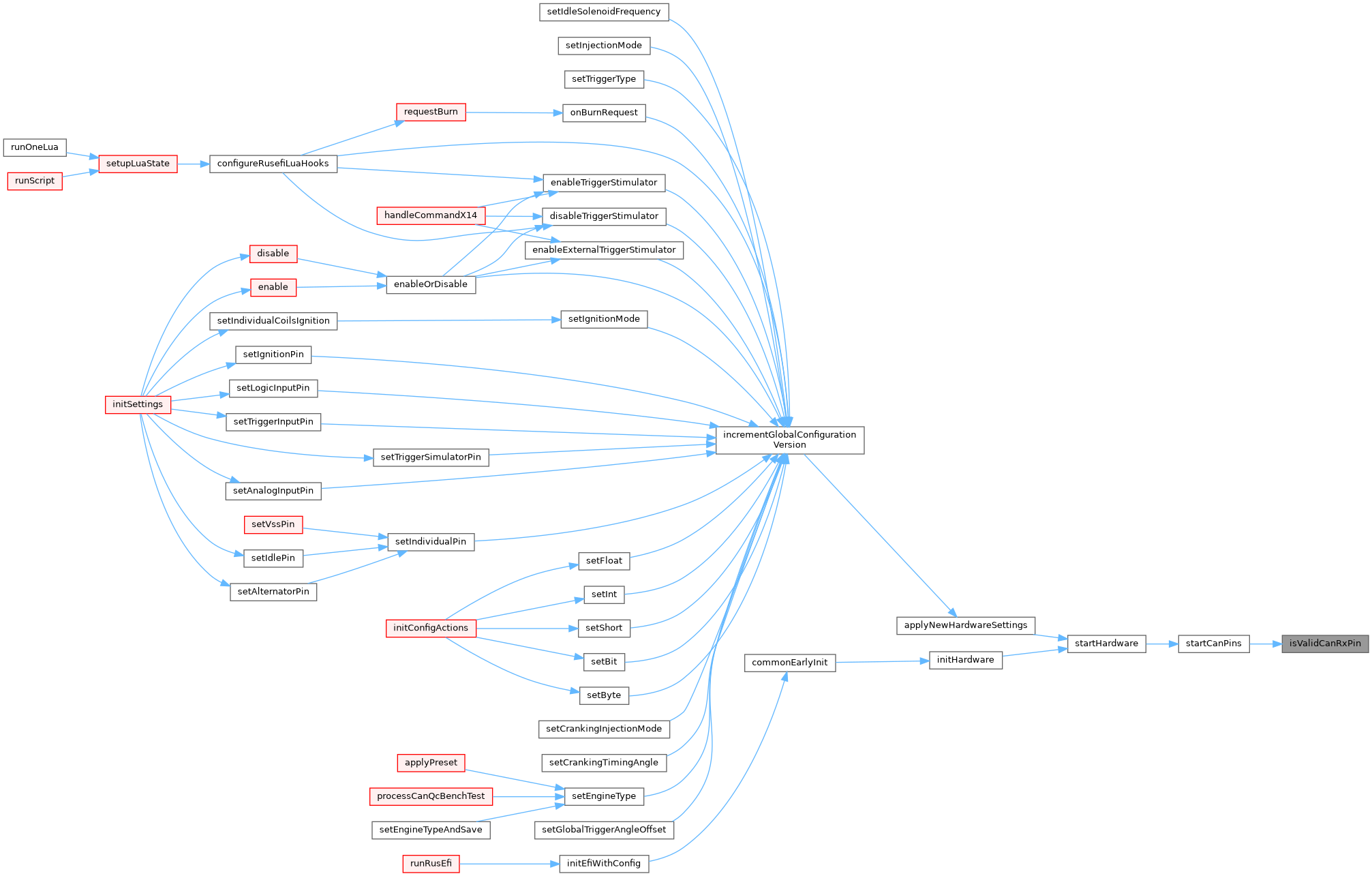
◆ isValidCanRxPin()
| bool isValidCanRxPin | ( | brain_pin_e | pin | ) |
Definition at line 89 of file at32_can.cpp.
Referenced by startCanPins().
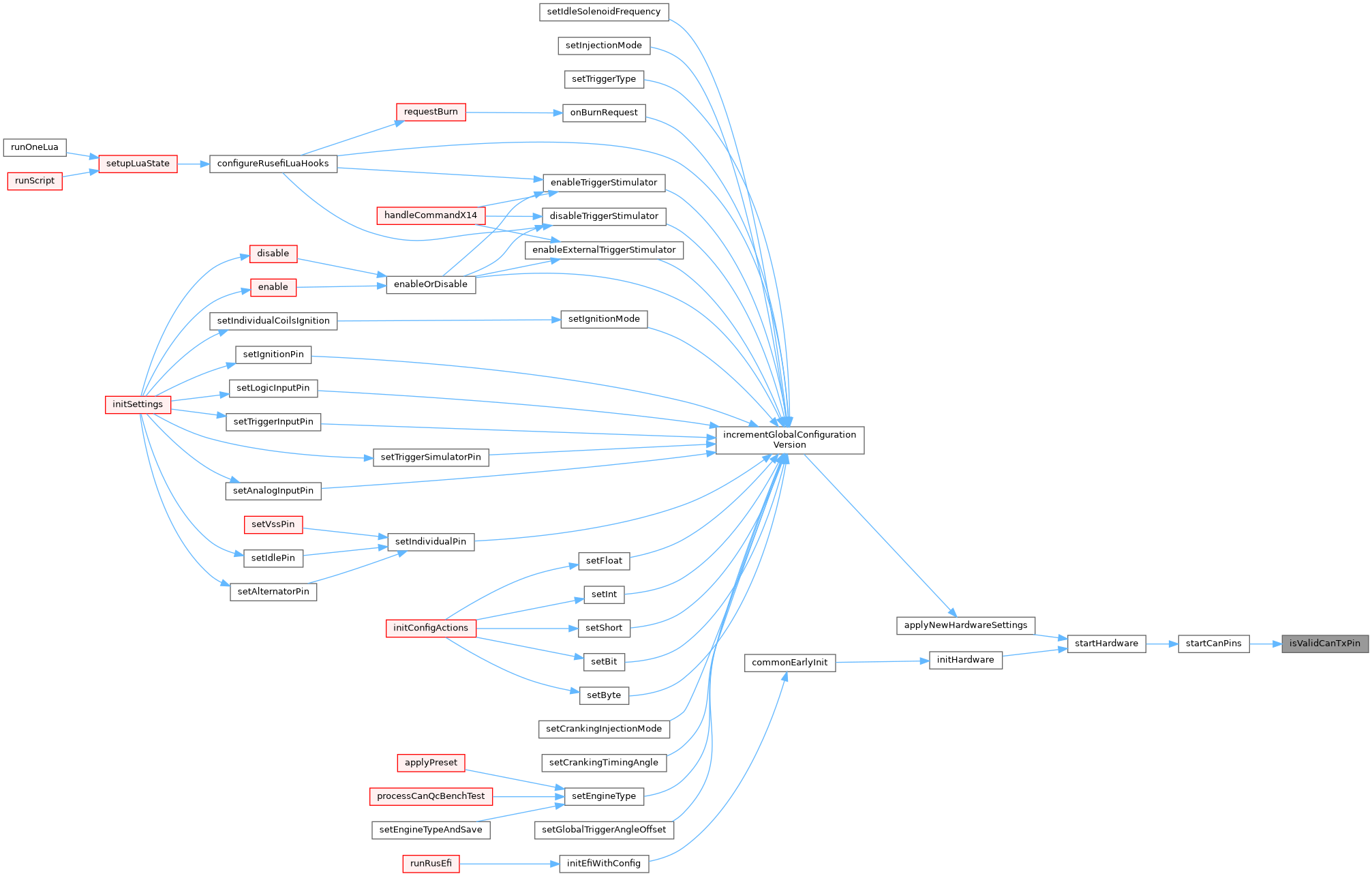
◆ isValidCanTxPin()
| bool isValidCanTxPin | ( | brain_pin_e | pin | ) |
Definition at line 85 of file at32_can.cpp.
Referenced by startCanPins().
◆ isValidSerialRxPin()
| bool isValidSerialRxPin | ( | brain_pin_e | pin | ) |

◆ isValidSerialTxPin()
| bool isValidSerialTxPin | ( | brain_pin_e | pin | ) |

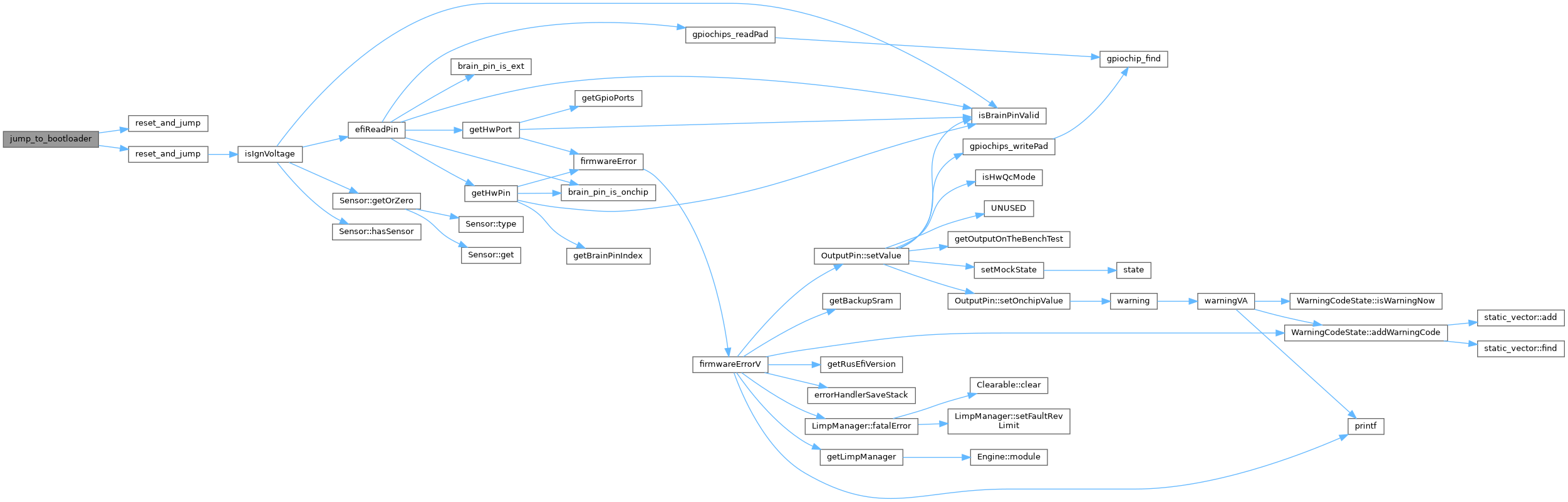
◆ jump_to_bootloader()
| void jump_to_bootloader | ( | ) |
Definition at line 106 of file at32_common.cpp.
Referenced by executeTSCommand(), and runRusEfi().

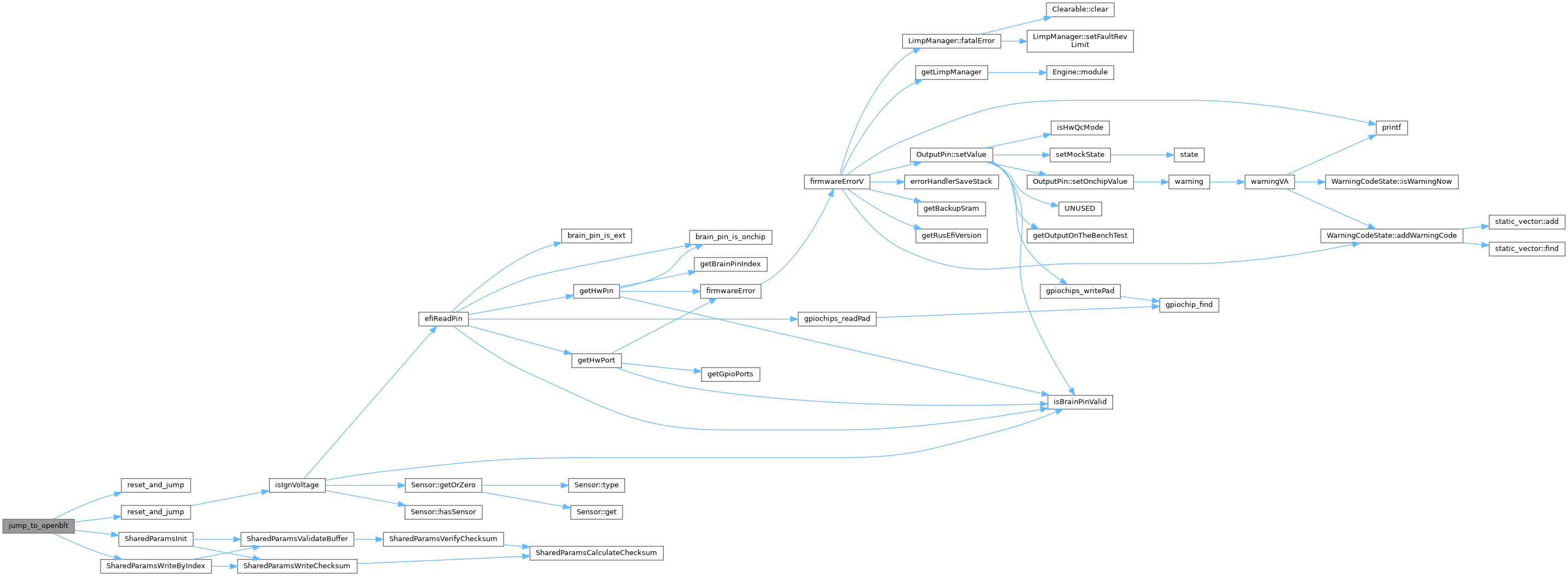
◆ jump_to_openblt()
| void jump_to_openblt | ( | ) |
Definition at line 115 of file at32_common.cpp.
Referenced by executeTSCommand(), processCanRxMessage(), and runRusEfi().

◆ mcuCanFlashWhileRunning()
| bool mcuCanFlashWhileRunning | ( | ) |
Definition at line 10 of file mpu_util.cpp.
Referenced by storageAllowWriteID().


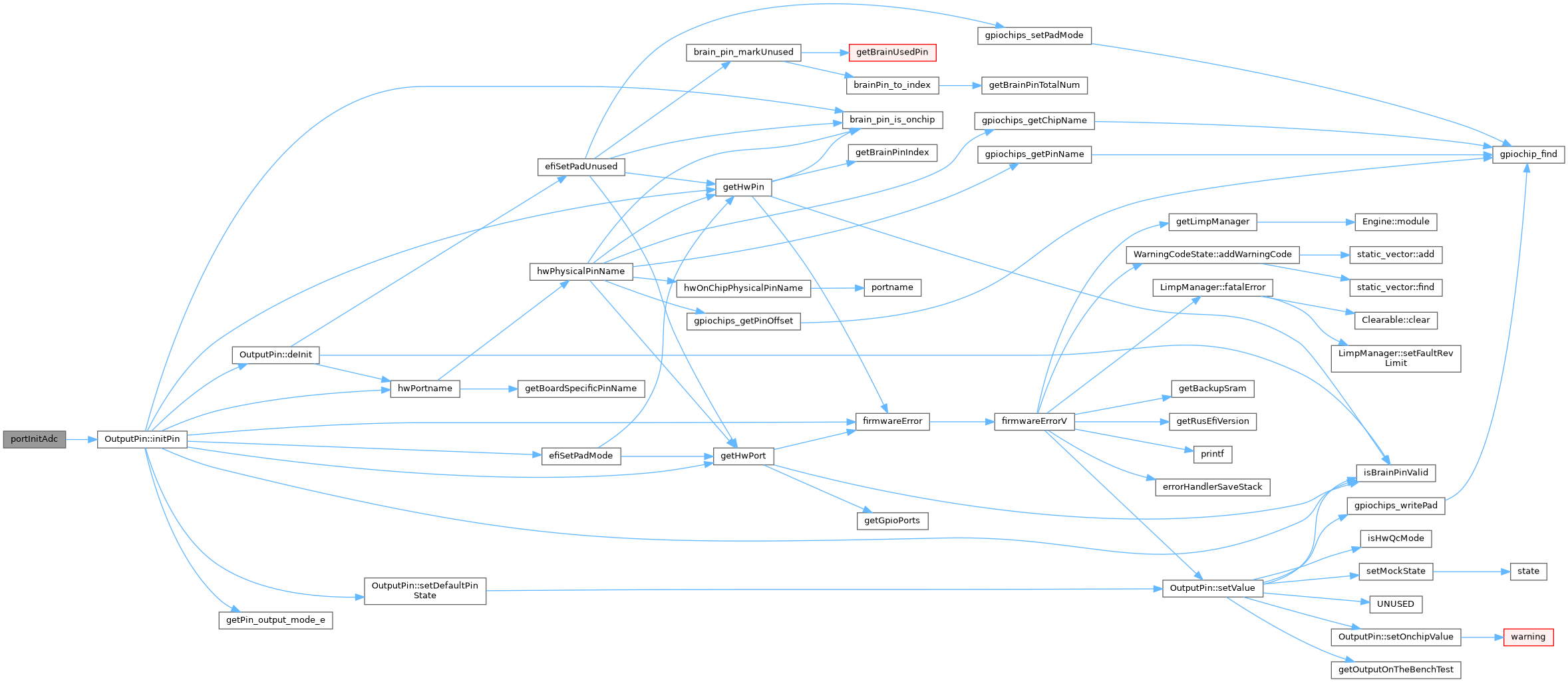
◆ portInitAdc()
| void portInitAdc | ( | ) |
Definition at line 261 of file mpu_util.cpp.
Referenced by initAdcInputs().

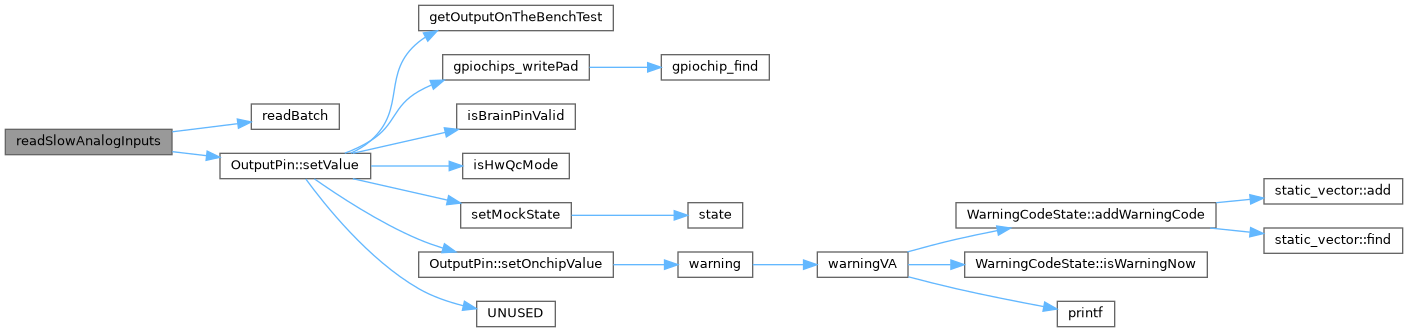
◆ readSlowAnalogInputs()
| bool readSlowAnalogInputs | ( | adcsample_t * | convertedSamples | ) |
Definition at line 284 of file mpu_util.cpp.
Referenced by adcOnchipSlowUpdate().

◆ spiCalcClockDiv()
| int spiCalcClockDiv | ( | SPIDriver * | spip, |
| SPIConfig * | spiConfig, | ||
| unsigned int | clk | ||
| ) |
Definition at line 260 of file at32_spi.cpp.
Referenced by initializeMmcBlockDevice().

◆ spiGetBaseClock()
| int spiGetBaseClock | ( | SPIDriver * | spip | ) |
Definition at line 254 of file at32_spi.cpp.
Referenced by sdStatistics().

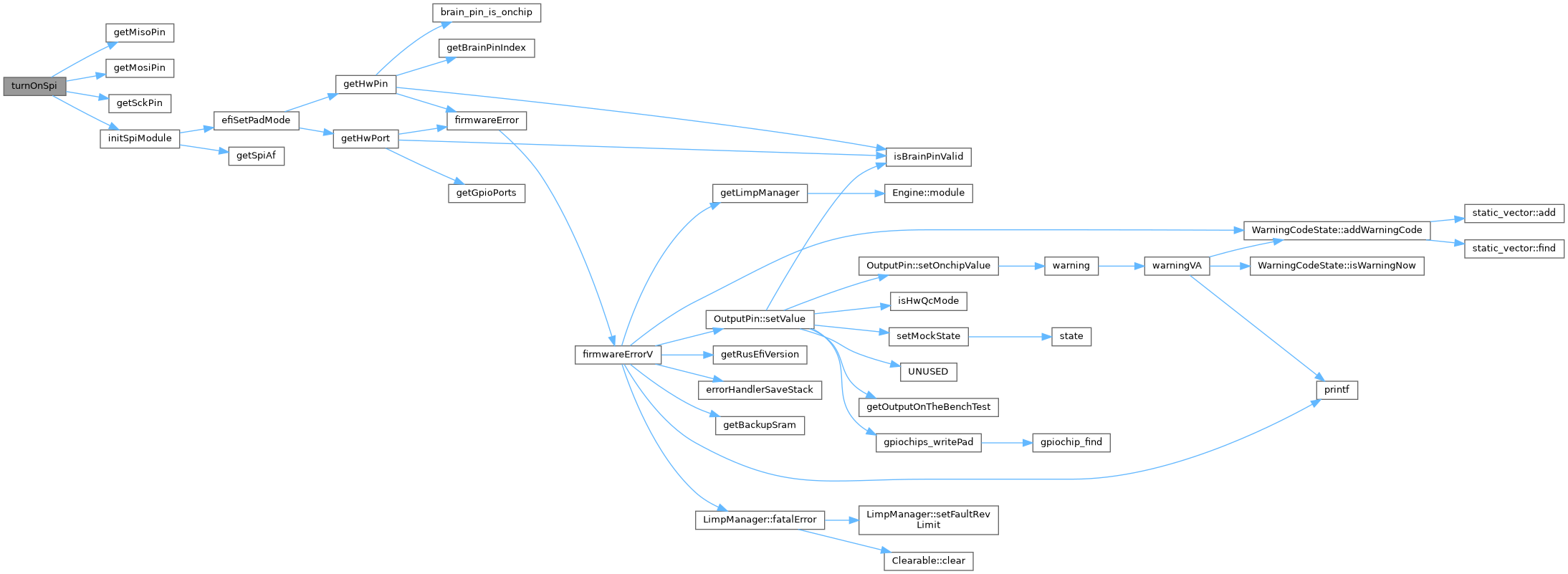
◆ turnOnSpi()
| void turnOnSpi | ( | spi_device_e | device | ) |
Definition at line 151 of file at32_spi.cpp.
◆ UsageFaultVector()
| void UsageFaultVector | ( | void | ) |

Variable Documentation
◆ mmc_hs_spicfg
|
extern |
Definition at line 273 of file at32_spi.cpp.
Referenced by initializeMmcBlockDevice(), and sdStatistics().
◆ mmc_ls_spicfg
|
extern |
Definition at line 288 of file at32_spi.cpp.
Referenced by initializeMmcBlockDevice(), and sdStatistics().