Detailed Description
Configuration defaults for the microRusefi board.
MICRO_RUS_EFI set engine_type 60
MRE_BOARD_OLD_TEST set engine_type 30
MRE_BOARD_NEW_TEST set engine_type 31
See https://wiki.rusefi.com/Hardware-microRusEfi-wiring
Definition in file board_configuration.cpp.
Functions | |
| static void | setInjectorPins () |
| static void | setIgnitionPins () |
| Gpio | getCommsLedPin () |
| Gpio | getRunningLedPin () |
| Gpio | getWarningLedPin () |
| static void | setupVbatt () |
| static void | setupTle8888 () |
| static void | setupEtb () |
| static void | setupDefaultSensorInputs () |
| static void | microrusefi_boardConfigOverrides () |
| static void | microrusefi_boardDefaultConfiguration () |
| Board-specific configuration defaults. | |
| int | getBoardMetaOutputsCount () |
| Gpio * | getBoardMetaOutputs () |
| int | getBoardMetaDcOutputsCount () |
| void | setup_custom_board_overrides () |
Variables | |
| static Gpio | MRE_OUTPUTS [] |
| static Gpio | M111_OUTPUTS [] |
Function Documentation
◆ getBoardMetaDcOutputsCount()
| int getBoardMetaDcOutputsCount | ( | ) |
Definition at line 228 of file board_configuration.cpp.
◆ getBoardMetaOutputs()
| Gpio * getBoardMetaOutputs | ( | ) |
Definition at line 221 of file board_configuration.cpp.
◆ getBoardMetaOutputsCount()
| int getBoardMetaOutputsCount | ( | ) |
Definition at line 214 of file board_configuration.cpp.
◆ getCommsLedPin()
| Gpio getCommsLedPin | ( | ) |
See https://rusefi.com/s/super-uaefi
See https://rusefi.com/s/uaefi121
Definition at line 40 of file board_configuration.cpp.
◆ getRunningLedPin()
| Gpio getRunningLedPin | ( | ) |
Definition at line 44 of file board_configuration.cpp.
◆ getWarningLedPin()
| Gpio getWarningLedPin | ( | ) |
Definition at line 49 of file board_configuration.cpp.
◆ microrusefi_boardConfigOverrides()
|
static |
Definition at line 122 of file board_configuration.cpp.
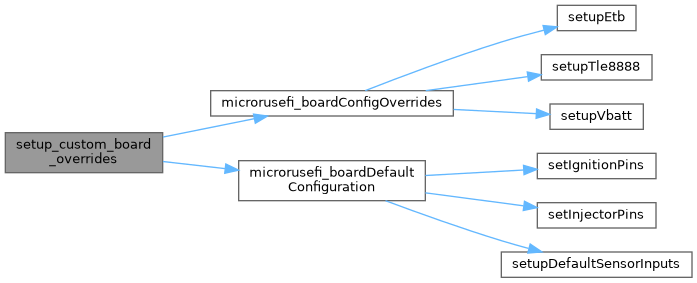
Referenced by setup_custom_board_overrides().

◆ microrusefi_boardDefaultConfiguration()
|
static |
Board-specific configuration defaults.
Definition at line 153 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

◆ setIgnitionPins()
|
static |
Definition at line 33 of file board_configuration.cpp.
◆ setInjectorPins()
|
static |
Definition at line 26 of file board_configuration.cpp.
◆ setup_custom_board_overrides()
| void setup_custom_board_overrides | ( | ) |
Definition at line 232 of file board_configuration.cpp.
◆ setupDefaultSensorInputs()
|
static |
Definition at line 94 of file board_configuration.cpp.

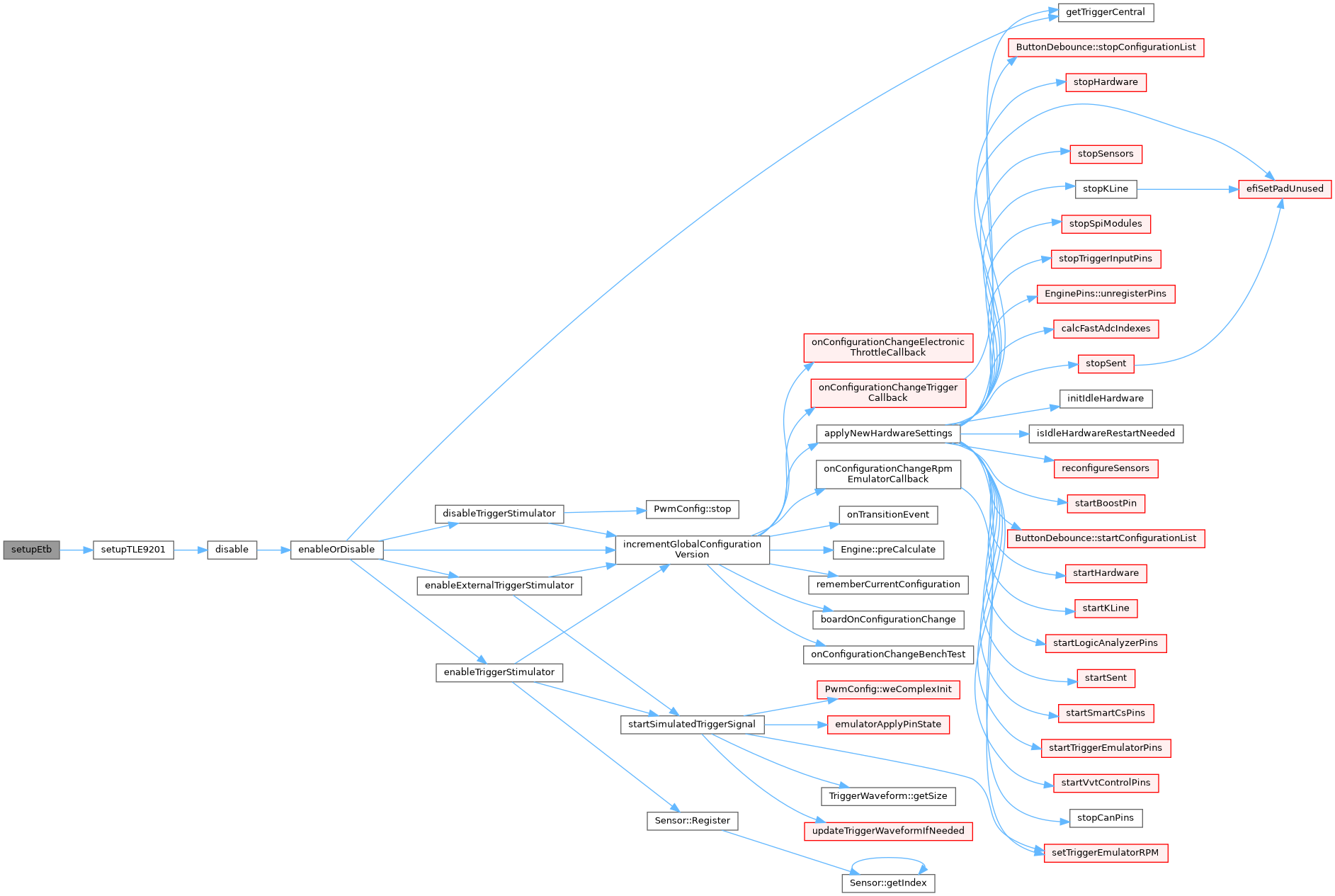
◆ setupEtb()
|
static |
Definition at line 90 of file board_configuration.cpp.
◆ setupTle8888()
|
static |
Definition at line 73 of file board_configuration.cpp.
Referenced by microrusefi_boardConfigOverrides().

◆ setupVbatt()
|
static |
Definition at line 54 of file board_configuration.cpp.
Referenced by microrusefi_boardConfigOverrides(), proteus_boardConfigOverrides(), and s105_boardConfigOverrides().
Variable Documentation
◆ M111_OUTPUTS
|
static |
Definition at line 201 of file board_configuration.cpp.
Referenced by getBoardMetaOutputs(), and getBoardMetaOutputsCount().
◆ MRE_OUTPUTS
|
static |
Definition at line 193 of file board_configuration.cpp.
Referenced by getBoardMetaOutputs(), and getBoardMetaOutputsCount().