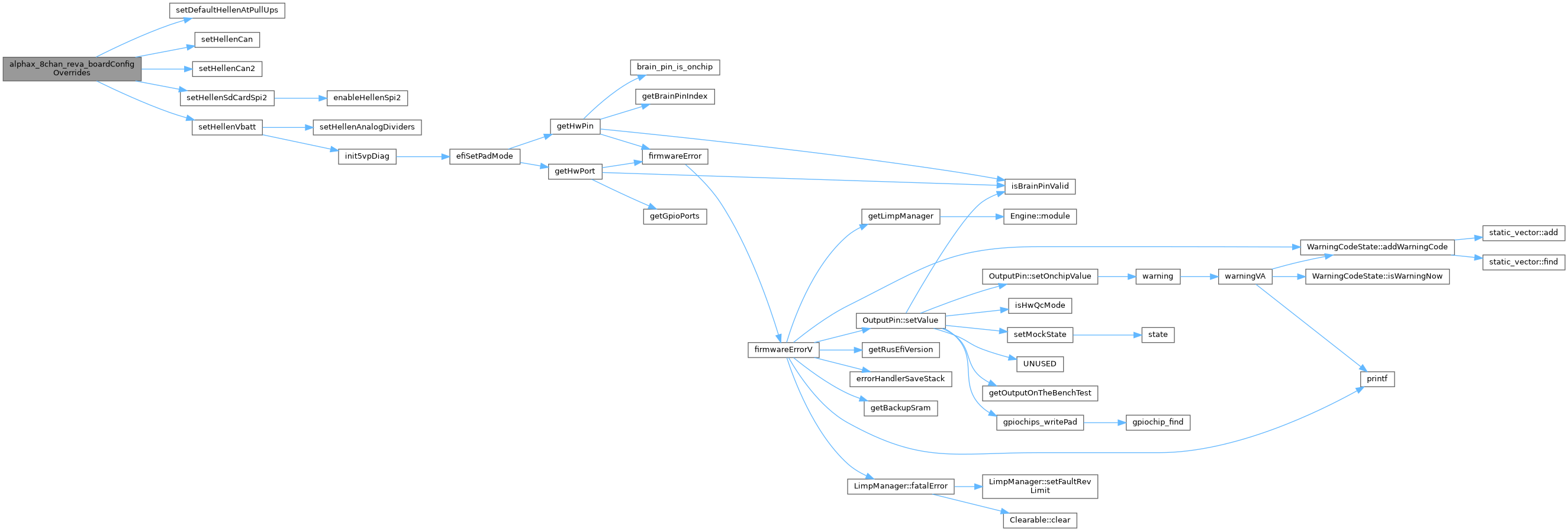
◆ alphax_8chan_reva_boardConfigOverrides()
| static void alphax_8chan_reva_boardConfigOverrides |
( |
| ) |
|
|
static |
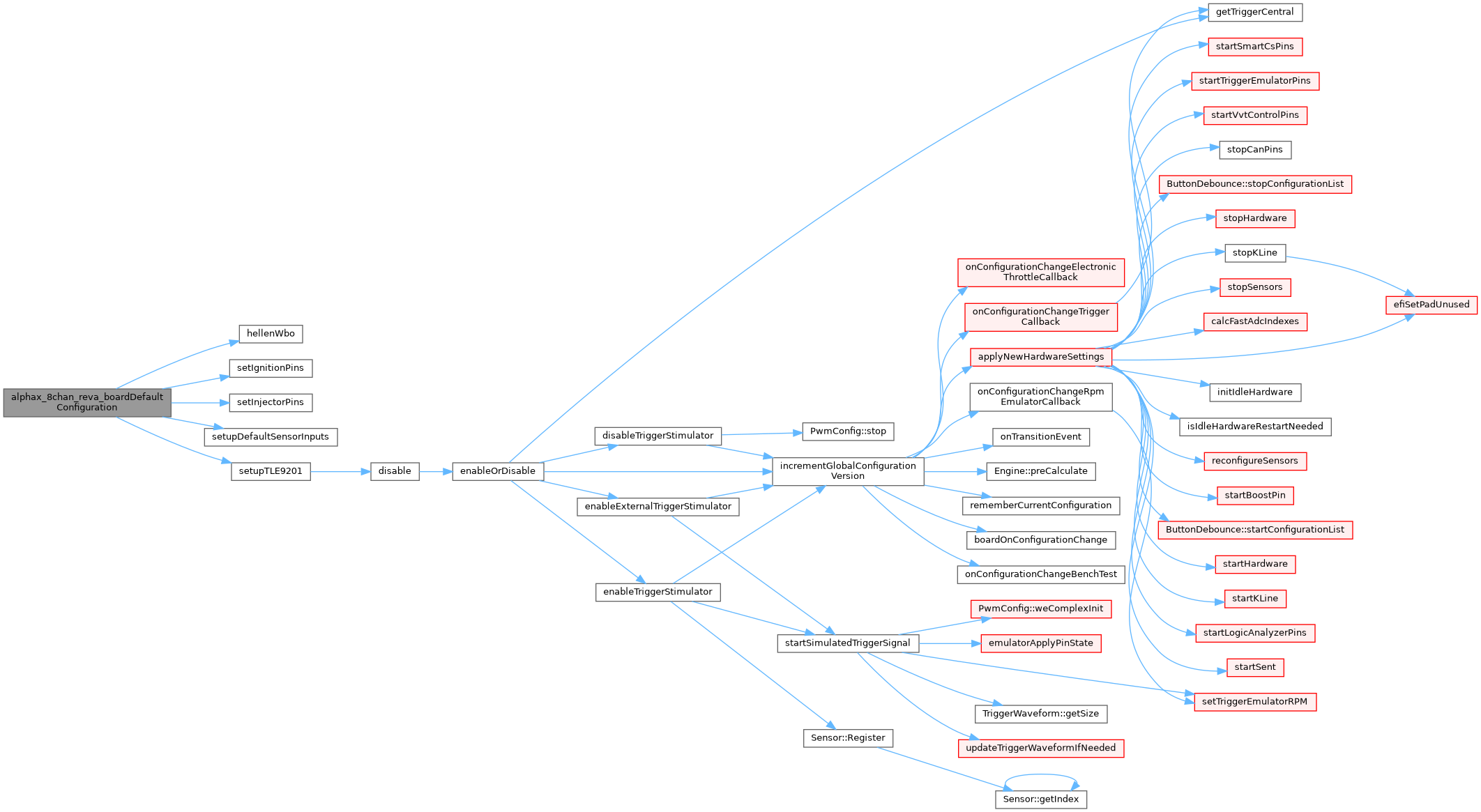
◆ alphax_8chan_reva_boardDefaultConfiguration()
| static void alphax_8chan_reva_boardDefaultConfiguration |
( |
| ) |
|
|
static |
Definition at line 115 of file board_configuration.cpp.
115 {
118
122
124
129
130
132
135
137
138
140
143
145}
static constexpr engine_configuration_s * engineConfiguration
static void setupDefaultSensorInputs()
static void setIgnitionPins()
static void setInjectorPins()
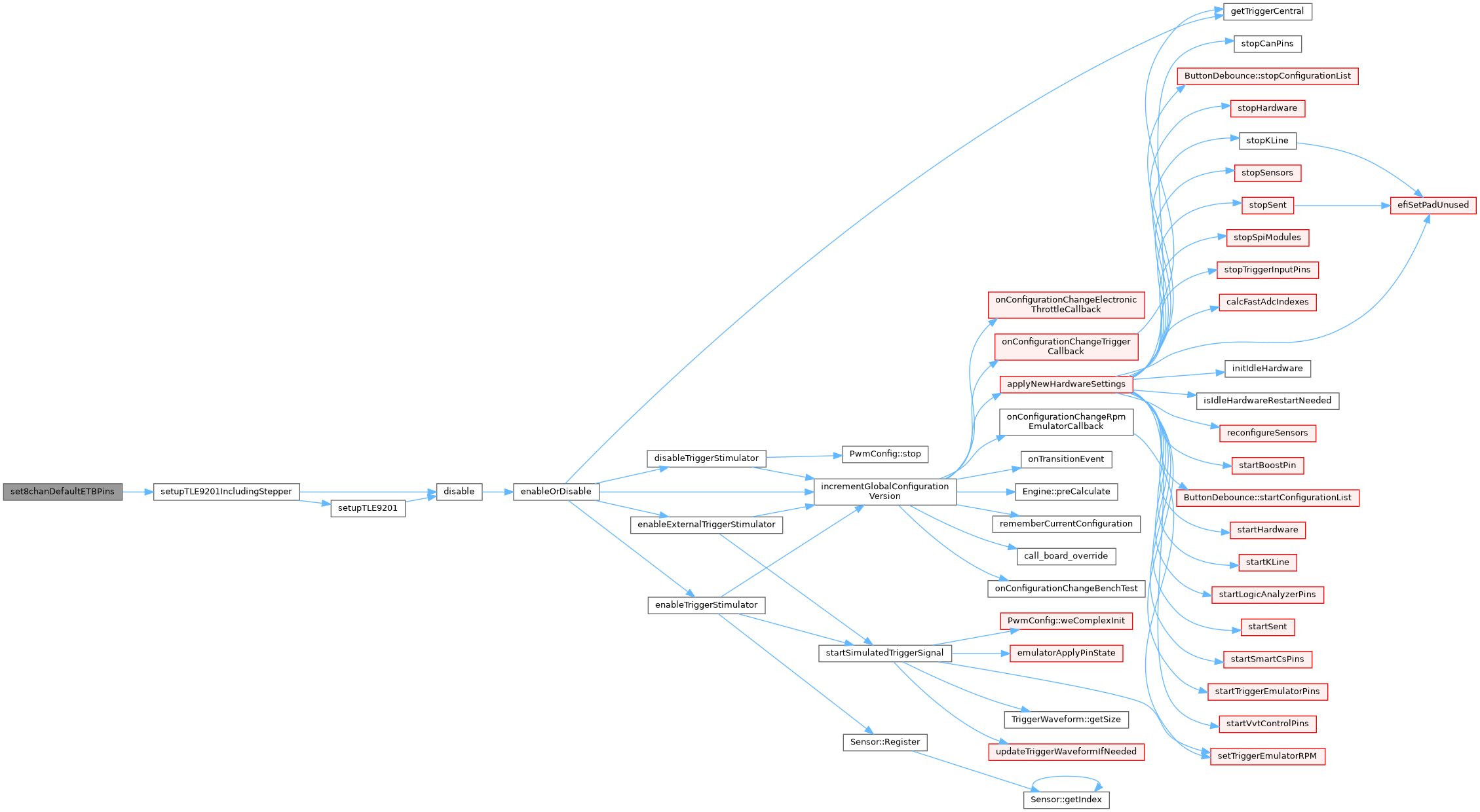
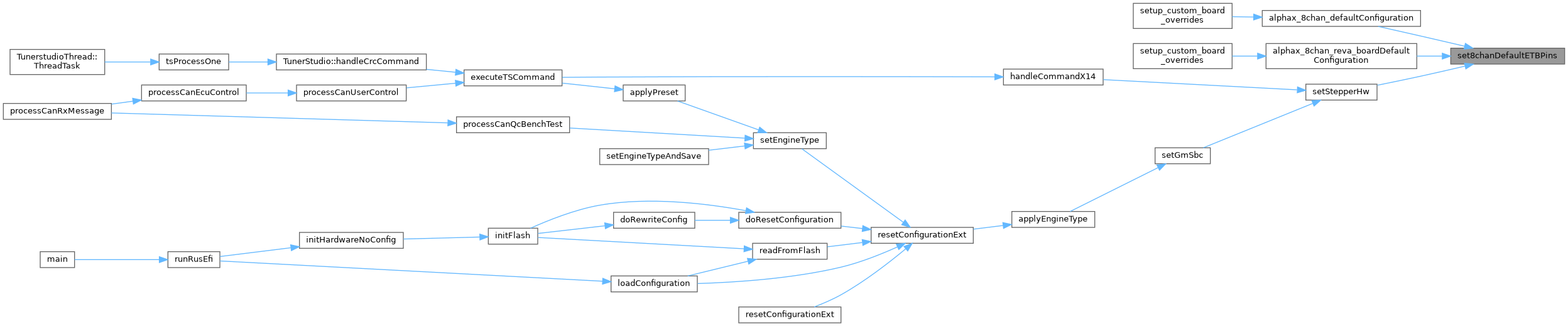
void set8chanDefaultETBPins()
ignition_mode_e ignitionMode
vr_threshold_s vrThreshold[VR_THRESHOLD_COUNT]
launchActivationMode_e launchActivationMode
output_pin_e vvtPins[CAM_INPUTS_COUNT]
output_pin_e mainRelayPin
output_pin_e tachOutputPin
firing_order_e firingOrder
Referenced by setup_custom_board_overrides().
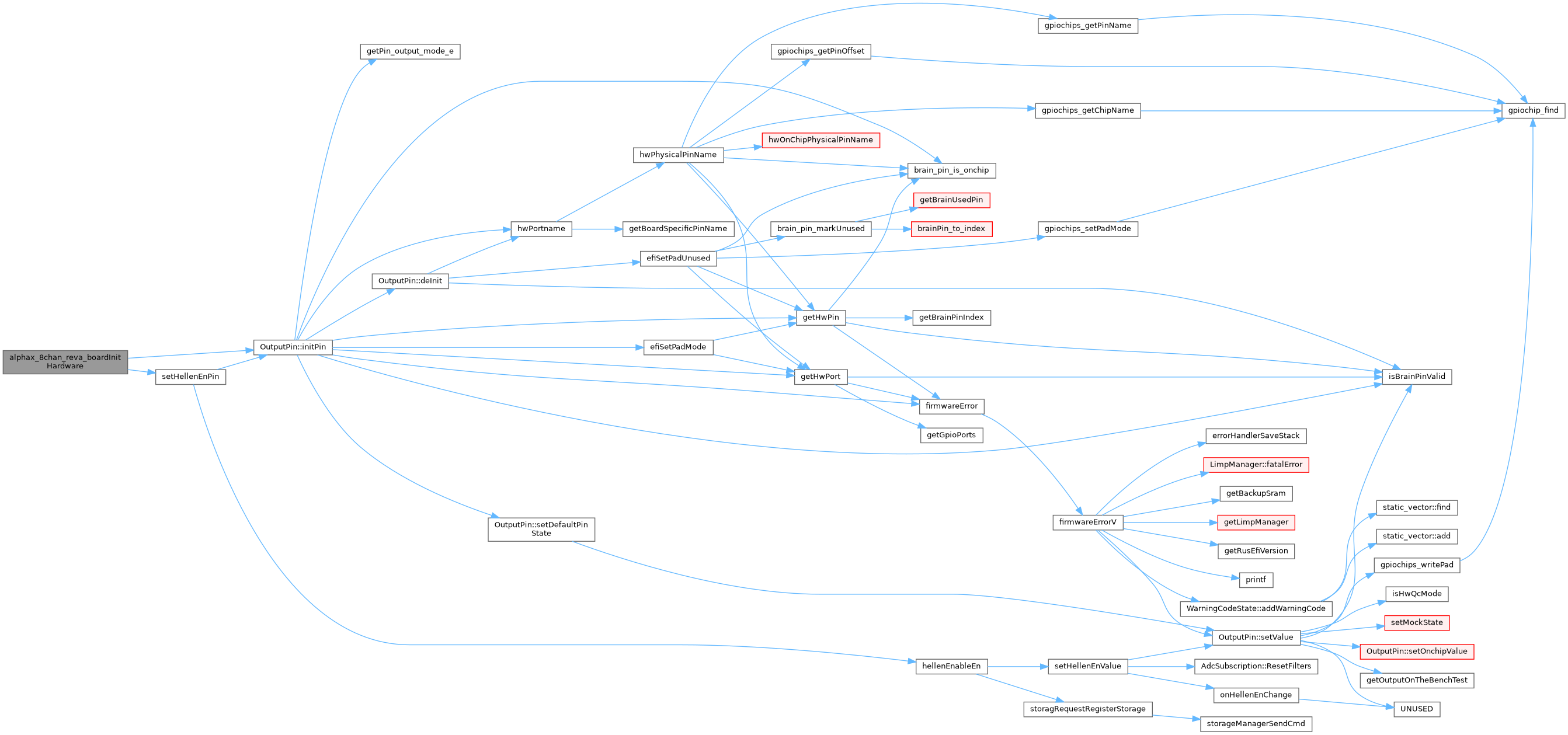
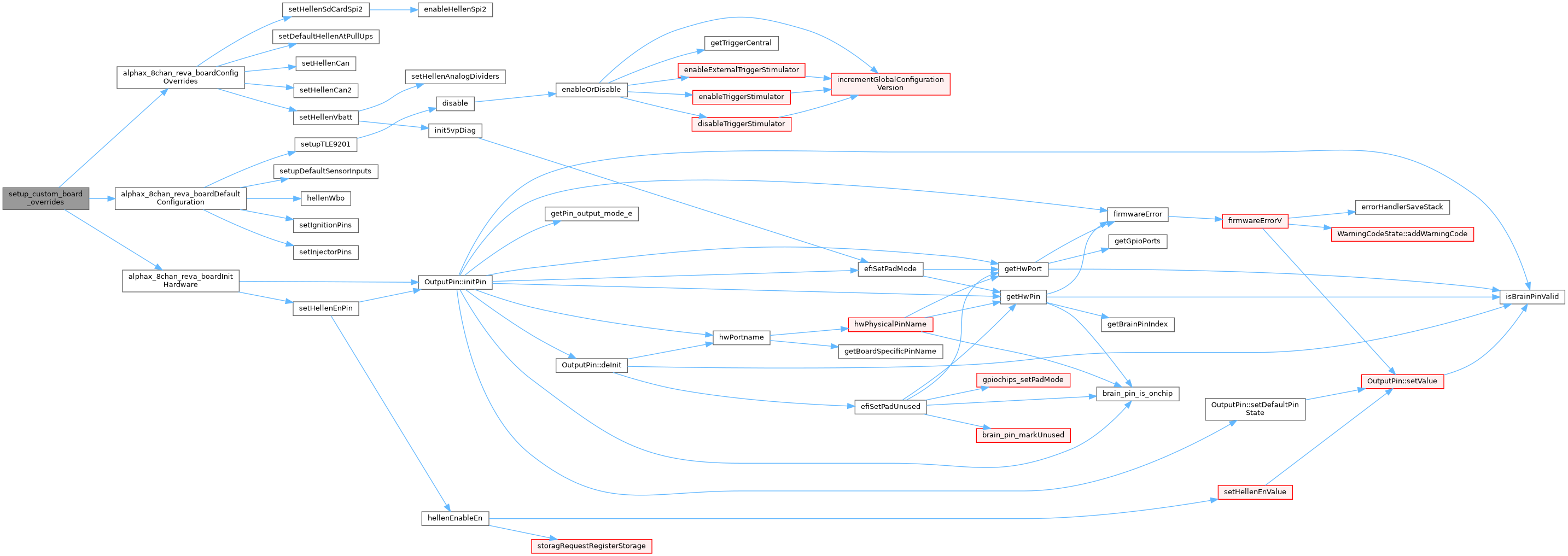
◆ alphax_8chan_reva_boardInitHardware()
| static void alphax_8chan_reva_boardInitHardware |
( |
| ) |
|
|
static |
Definition at line 72 of file board_configuration.cpp.
72 {
74
80
84
85}
void initPin(const char *msg, brain_pin_e brainPin, pin_output_mode_e outputMode, bool forceInitWithFatalError=false)
static OutputPin alphaCamPullDown
static OutputPin alphaTachPullUp
static OutputPin alphaCrankPPullUp
static OutputPin alphaTempPullUp
static OutputPin alpha2stepPullDown
static OutputPin alphaD2PullDown
static OutputPin alphaD3PullDown
static OutputPin alphaD4PullDown
void setHellenEnPin(Gpio pin, bool enableBoardOnStartUp)
Referenced by setup_custom_board_overrides().
◆ boardPrepareForStop()
| void boardPrepareForStop |
( |
| ) |
|
Definition at line 147 of file board_configuration.cpp.
147 {
148
149 palEnableLineEvent(PAL_LINE(GPIOD, 0), PAL_EVENT_MODE_RISING_EDGE);
150}
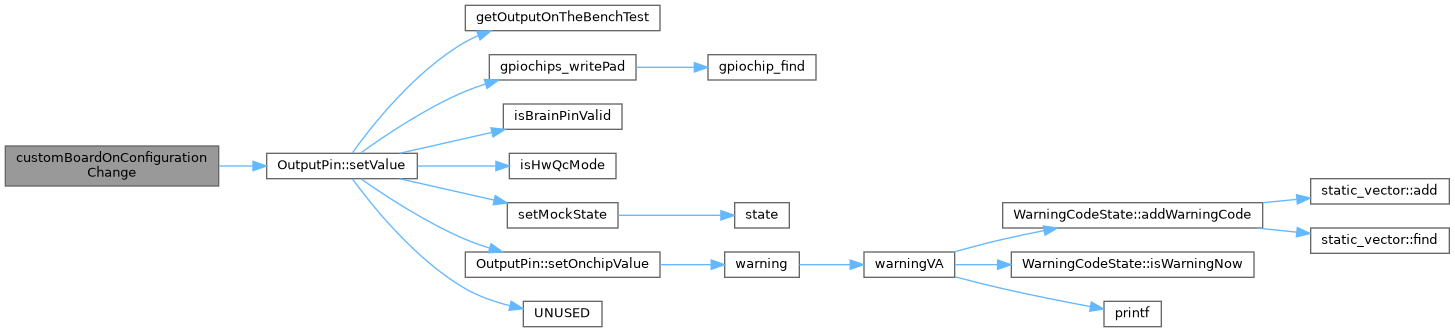
◆ customBoardOnConfigurationChange()
Definition at line 87 of file board_configuration.cpp.
87 {
93
97}
void setValue(const char *msg, int logicValue, bool isForce=false)
static constexpr persistent_config_s * config
bool boardUse2stepPullDown
◆ getBoardMetaOutputs()
| Gpio * getBoardMetaOutputs |
( |
| ) |
|
◆ getBoardMetaOutputsCount()
| int getBoardMetaOutputsCount |
( |
| ) |
|
◆ set8chanDefaultETBPins()
| void set8chanDefaultETBPins |
( |
| ) |
|
◆ setIgnitionPins()
| static void setIgnitionPins |
( |
| ) |
|
|
static |
◆ setInjectorPins()
| static void setInjectorPins |
( |
| ) |
|
|
static |
Definition at line 27 of file board_configuration.cpp.
27 {
32
37}
pin_input_mode_e clutchDownPinMode
switch_input_pin_e clutchDownPin
output_pin_e injectionPins[MAX_CYLINDER_COUNT]
output_pin_e malfunctionIndicatorPin
◆ setup_custom_board_overrides()
| void setup_custom_board_overrides |
( |
| ) |
|
Definition at line 167 of file board_configuration.cpp.
167 {
171
173}
std::optional< setup_custom_board_overrides_type > custom_board_InitHardware
std::optional< setup_custom_board_overrides_type > custom_board_ConfigOverrides
std::optional< setup_custom_board_overrides_type > custom_board_DefaultConfiguration
std::optional< setup_custom_board_config_type > custom_board_OnConfigurationChange
static void customBoardOnConfigurationChange(engine_configuration_s *)
static void alphax_8chan_reva_boardDefaultConfiguration()
static void alphax_8chan_reva_boardConfigOverrides()
static void alphax_8chan_reva_boardInitHardware()
◆ setupDefaultSensorInputs()
| static void setupDefaultSensorInputs |
( |
| ) |
|
|
static |
Definition at line 46 of file board_configuration.cpp.
46 {
47
51
53
55
56
59
60
63
64
66
68
70}
void setPPSInputs(adc_channel_e pps1, adc_channel_e pps2)
void setTPS1Inputs(adc_channel_e tps1, adc_channel_e tps2)
air_pressure_sensor_config_s sensor
air_pressure_sensor_type_e type
tps_limit_t tps1SecondaryMax
air_pressure_sensor_config_s baroSensor
brain_input_pin_e triggerInputPins[TRIGGER_INPUT_PIN_COUNT]
tps_limit_t tps1SecondaryMin
brain_input_pin_e camInputs[CAM_INPUTS_COUNT]
◆ alpha2stepPullDown
◆ alphaCamPullDown
◆ alphaCrankPPullUp
◆ alphaD2PullDown
◆ alphaD3PullDown
◆ alphaD4PullDown
◆ alphaTachPullUp
◆ alphaTempPullUp
◆ OUTPUTS
Initial value:= {
Gpio::H144_LS_1,
Gpio::H144_LS_2,
Gpio::H144_LS_3,
Gpio::H144_LS_4,
}
Definition at line 152 of file board_configuration.cpp.
152 {
153 Gpio::H144_LS_1,
154 Gpio::H144_LS_2,
155 Gpio::H144_LS_3,
156 Gpio::H144_LS_4,
157};
Go to the source code of this file.