Functions | |
| void | setGmSbc () |
| void | setGmLcv () |
| void | setGmLtg () |
| void | setGmLnf () |
| void | setGmSbcGen5 () |
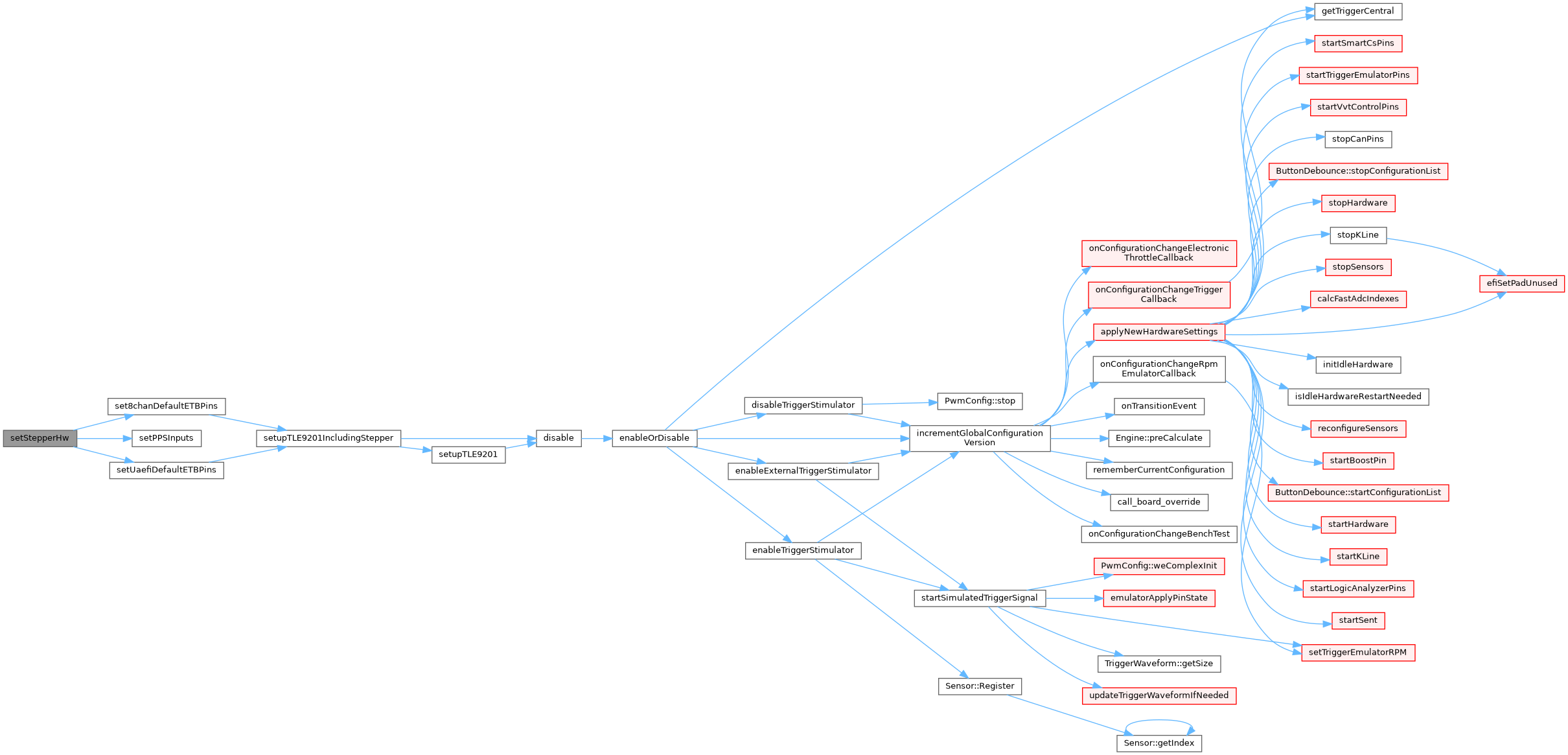
| void | setStepperHw () |
Function Documentation
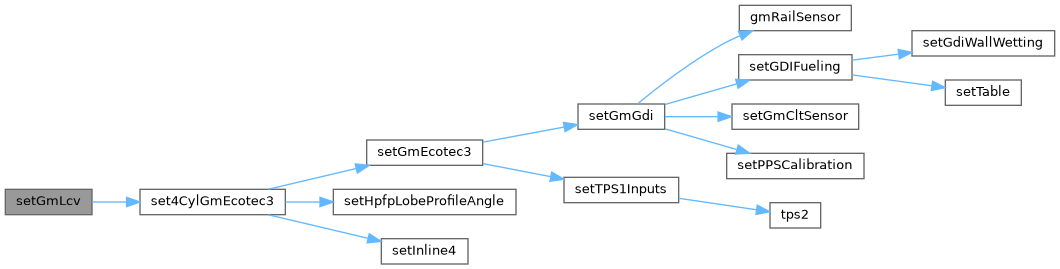
◆ setGmLcv()
| void setGmLcv | ( | ) |
Definition at line 208 of file gm_sbc.cpp.
208 {
209 set4CylGmEcotec3();
213}
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
air_pressure_sensor_config_s sensor
air_pressure_sensor_type_e type
MAP_sensor_config_s map
float displacement
vehicle_info_t engineCode
Referenced by applyEngineType().
Here is the call graph for this function:
Here is the caller graph for this function:

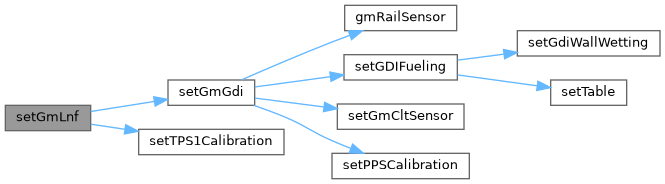
◆ setGmLnf()
| void setGmLnf | ( | ) |
Definition at line 215 of file gm_sbc.cpp.
215 {
216 setGmGdi();
219 setTPS1Calibration(880, 129, 118, 870);
220
222
223 // todo: engineConfiguration->hpfpCam = HPFP_CAM_IN1;
224#ifdef HW_HELLEN_8CHAN
229
232#endif // HW_HELLEN_8CHAN
233}
void setTPS1Calibration(uint16_t tpsMin, uint16_t tpsMax)
Definition default_base_engine.cpp:457
linear_sensor_s highPressureFuel
bool invertCamVVTSignal
output_pin_e vvtPins[CAM_INPUTS_COUNT]
vvt_mode_e vvtMode[CAMS_PER_BANK]
bool invertPrimaryTriggerSignal
int16_t hpfpPeakPos
adc_channel_e hwChannel
Referenced by applyEngineType().
Here is the call graph for this function:
Here is the caller graph for this function:

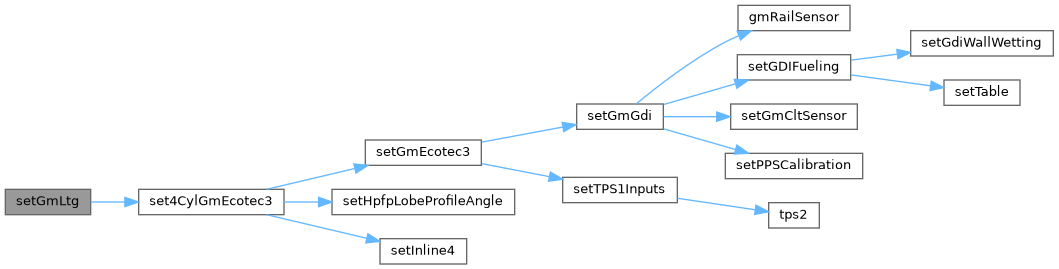
◆ setGmLtg()
| void setGmLtg | ( | ) |
Definition at line 236 of file gm_sbc.cpp.
236 {
237 set4CylGmEcotec3();
239#ifdef HW_HELLEN_8CHAN
242
244
245 engineConfiguration->luaOutputPins[0] = Gpio::MM176_OUT_IO1; // 7C - High Side 3 - unusual starter
246 engineConfiguration->luaOutputPins[1] = Gpio::MM176_OUT_IO4, // 9C - Low Side 4 - unusual starter
247#endif // HW_HELLEN_8CHAN
249}
brain_input_pin_e triggerInputPins[TRIGGER_INPUT_PIN_COUNT]
linear_sensor_s oilPressure
output_pin_e luaOutputPins[LUA_PWM_COUNT]
Referenced by applyEngineType().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ setGmSbc()
| void setGmSbc | ( | ) |
Definition at line 74 of file gm_sbc.cpp.
74 {
76 // that's original firing order before gen 3
79
80 // see engine sniffer at https://github.com/rusefi/rusefi/issues/5353
81 // if injectors are wired in groups of four best to use channels 1 and 4
84
87 // white wire "HEI E" plug pin D
90
91 // this is used to tell HEI that we are always in charge of timing advance
93 ignOverride->pwmFrequency = 0;
96
97#ifdef HW_HELLEN_UAEFI121
98 // coil control plug pin A
99
100 // tan wire with a black trace - "HEI B", plug pin B (we use yellow)
102 // tach plug pin C
107#endif // HW_HELLEN_UAEFI121
108
109#ifdef HW_HELLEN_SUPER_UAEFI
112#endif // HW_HELLEN_SUPER_UAEFI
113
114#if HW_PROTEUS
115 // tan wire with a black trace - "HEI B", plug pin B
116 ignOverride->pin = Gpio::PROTEUS_IGN_12;
118 // reminder about D101
120 // reminder about D104
122
123 // wow high side relay control on MEFI1 ELECTRONIC-FUEL-INJECTION-MEFI-1-2-5.7L-350CID-8.2L-502CID.pdf page 46
125 // low side on MEFI3 ELECTRONIC-FUEL-INJECTION-MEFI-3-5.7L-350CID-8.2L-502CID.pdf page 487
126
128#endif // HW_PROTEUS
130
131 // for instance IWP069
133
134 setStepperHw();
135
136 // 8 cylinders one coil HEI trigger
141 // Proteus Digital 1 is Tach input "HEI R", plug pin C
142
144}
@ Unassigned
@ TT_TOOTHED_WHEEL
vehicle_info_t engineMake
injector_s injector
output_pin_e fuelPumpPin
angle_t globalTriggerAngleOffset
trigger_config_s trigger
gppwm_channel gppwm[GPPWM_CHANNELS]
bool skippedWheelOnCam
ignition_mode_e ignitionMode
gppwm_note_t gpPwmNote[GPPWM_CHANNELS]
ThermistorConf clt
output_pin_e fanPin
output_pin_e mainRelayPin
uint32_t cylindersCount
output_pin_e injectionPins[MAX_CYLINDER_COUNT]
injection_mode_e crankingInjectionMode
firing_order_e firingOrder
injection_mode_e injectionMode
brain_input_pin_e camInputs[CAM_INPUTS_COUNT]
output_pin_e ignitionPins[MAX_CYLINDER_COUNT]
scaled_channel< uint8_t, 2, 1 > table[GPPWM_LOAD_COUNT][GPPWM_RPM_COUNT]
uint16_t pwmFrequency
output_pin_e pin
int customSkippedToothCount
int customTotalToothCount
trigger_type_e type
constexpr void setTable(TElement(&dest)[N][M], const VElement value)
Definition table_helper.h:167
Referenced by applyEngineType().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ setGmSbcGen5()
| void setGmSbcGen5 | ( | ) |
Definition at line 251 of file gm_sbc.cpp.
251 {
252 setGmEcotec3();
258
259 // engineConfiguration->hpfpPumpVolume = 0.623; // LT4
261
262 // LT 17.7 g/sec at 100bar which 1440
263 // todo: real flow!
265
266#ifdef HW_HELLEN_8CHAN
269
274
279
281
286
287 // early models before SENT
288 // todo: early gen5 LS engines have redundant high pressure sensors #7364
293
298
303
309#endif // HW_HELLEN_8CHAN
310}
linear_sensor_s acPressure
scaled_channel< uint8_t, 10, 1 > mc33_hpfp_i_hold
output_pin_e starterControlPin
adc_channel_e fuelLevelSensor
scaled_channel< uint16_t, 1000, 1 > hpfpPumpVolume
linear_sensor_s lowPressureFuel
brain_input_pin_e flexSensorPin
uint8_t hpfpCamLobes
scaled_channel< uint8_t, 10, 1 > mc33_hpfp_i_peak
float value1
float value2
Referenced by applyEngineType().
Here is the call graph for this function:
Here is the caller graph for this function:

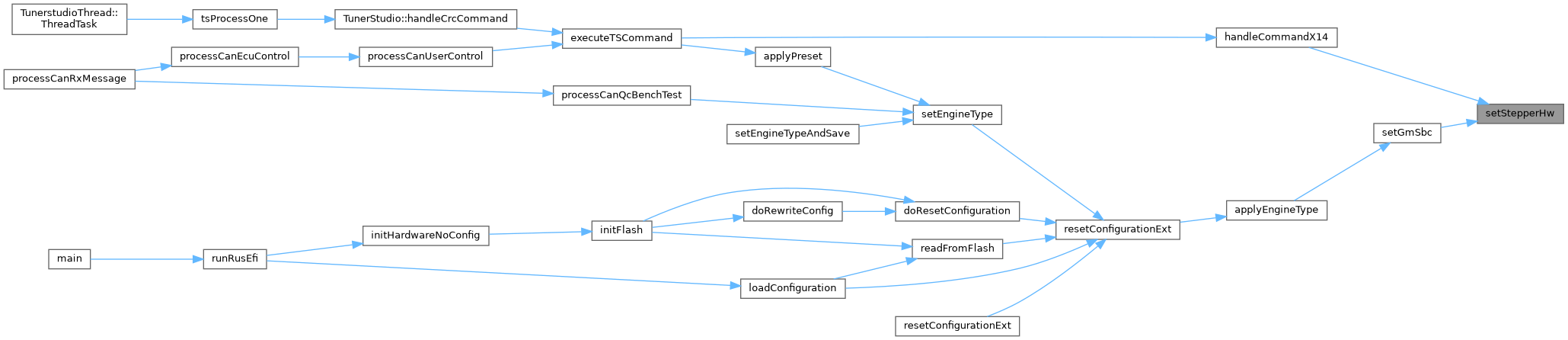
◆ setStepperHw()
| void setStepperHw | ( | ) |
Definition at line 15 of file gm_sbc.cpp.
15 {
20
21 for (size_t i = 0;i<ETB_COUNT;i++) {
23 }
24
25 setPPSInputs(EFI_ADC_NONE, EFI_ADC_NONE);
26
27#ifdef HW_HELLEN_8CHAN
29 set8chanDefaultETBPins();
30#endif // HW_HELLEN_8CHAN
31
32#ifdef HW_HELLEN_UAEFI
34 setUaefiDefaultETBPins();
35#endif // HW_HELLEN_UAEFI
36
37#ifdef HW_PROTEUS
38//Coil 1 - Pin 15 DC2 positive Pin A Toyota iac pin 4
39//Coil 1 - Pin 8 DC2 negative Pin B Toyota iac pin 6
40//Coil 2 - Pin 7 DC1 positive Pin C Toyota iac pin 1
41//Coil 2 - Pin 6 DC1 negative Pin D Toyota iac pin 3
42
43 // coil #1 = proteus pin 15 (DC2 positive) to BL pin "A", pin B to pin 8 (DC2 negative)
44 // PWM pin
46 // DIR pin
48 // Disable pin
50 // Unused
52
53 // coil #2 - proteus pin 7 (DC1 positive) to AH pin "D", pin C to pin 6 (DC1 negative)
54 // PWM pin
56 // DIR pin
58 // Disable pin
60 // Unused
62
63#endif // HW_PROTEUS
64}
@ D12
@ D10
@ D9
@ D8
@ D13
@ D11
void setPPSInputs(adc_channel_e pps1, adc_channel_e pps2)
Definition default_base_engine.cpp:447
Gpio directionPin1
Gpio directionPin2
Gpio disablePin
Gpio controlPin
dc_function_e etbFunctions[ETB_COUNT]
bool stepperDcInvertedPins
bool useStepperIdle
dc_io stepperDcIo[DC_PER_STEPPER]
bool useHbridgesToDriveIdleStepper
bool stepper_dc_use_two_wires
Referenced by handleCommandX14(), and setGmSbc().
Here is the call graph for this function:
Here is the caller graph for this function: