Detailed Description
- Date
- Dec 11, 2013
Definition in file map_averaging.h.
Data Structures | |
| struct | mapSampler |
| class | MapAverager |
| class | MapAveragingModule |
Functions | |
| void | mapAveragingAdcCallback (float instantVoltage) |
| MapAverager & | getMapAvg (size_t idx) |
| float | filterMapValue (float value) |
| void | startAveraging (struct mapSampler *s) |
Function Documentation
◆ filterMapValue()
Definition at line 99 of file map_averaging.cpp.
99 {
102}
void setSmoothingFactor(float p_smoothingFactor)
Definition exp_average.h:26
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
float mapExpAverageAlpha
Referenced by MapAverager::stop().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ getMapAvg()
| MapAverager & getMapAvg | ( | size_t | idx | ) |
Definition at line 28 of file init_map.cpp.
28 {
29 // May 2025: cylinderBankIndex is always zero, second MAP sensor feature is not finished
31}
static MapAverager fastMapSensor(SensorType::MapFast, MS2NT(200))
static MapAverager fastMapSensor2(SensorType::MapFast2, MS2NT(200))
Referenced by mapAveragingAdcCallback(), and startAveraging().
Here is the caller graph for this function:

◆ mapAveragingAdcCallback()
| void mapAveragingAdcCallback | ( | float | instantVoltage | ) |
This method is invoked from ADC callback.
- Note
- This method is invoked OFTEN, this method is a potential bottleneck - the implementation should be as fast as possible
Definition at line 140 of file map_averaging.cpp.
140 {
142
144
145 if (!mapResult) {
146 // hopefully this warning is not too much CPU consumption for fast ADC callback
149 } else {
151 }
152
153#if EFI_TUNER_STUDIO
154 float instantMap = mapResult.value_or(0);
156#endif // EFI_TUNER_STUDIO
157}
@ CUSTOM_ERR_6650
@ CUSTOM_INSTANT_MAP_DECODING
scaled_channel< uint16_t, 30, 1 > instantMAPValue
Definition output_channels_generated.h:903
Referenced by onFastAdcComplete().
Here is the call graph for this function:

Here is the caller graph for this function:

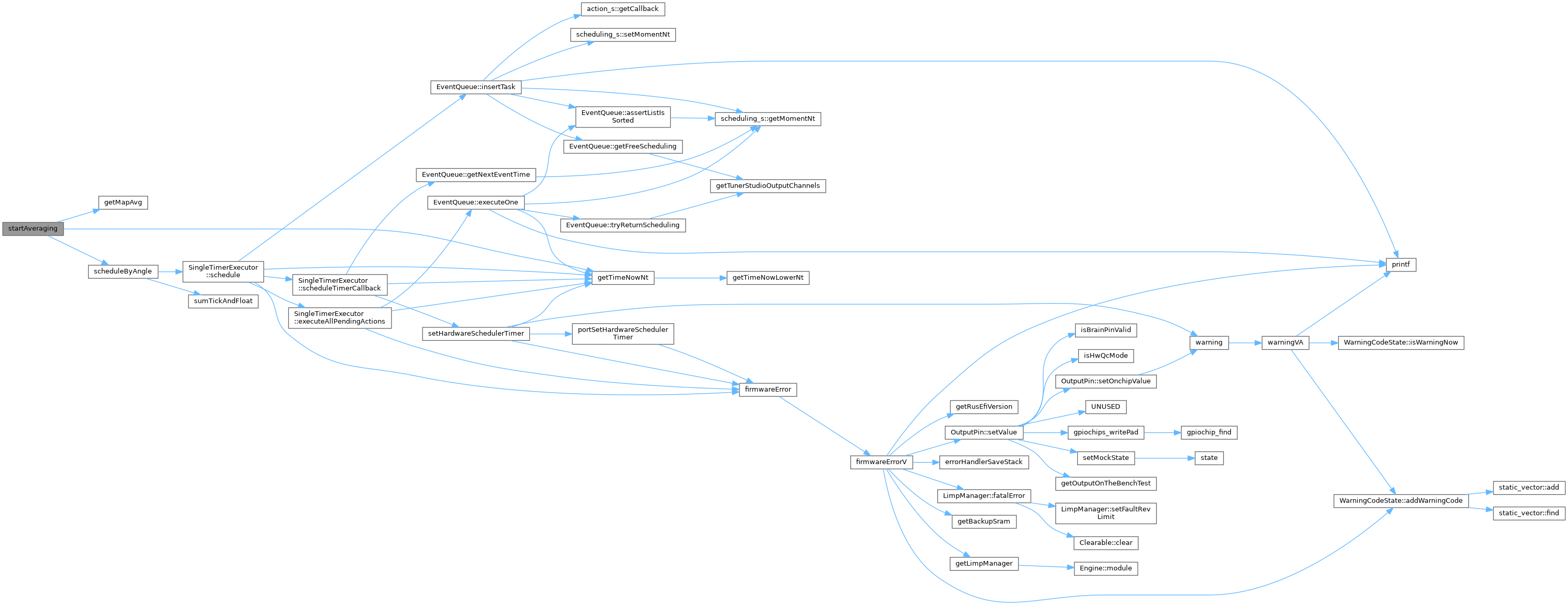
◆ startAveraging()
| void startAveraging | ( | struct mapSampler * | s | ) |
Definition at line 56 of file map_averaging.cpp.
56 {
58 // Zero duration means the engine wasn't spinning or something, abort
59 return;
60 }
62
63 // TODO: set currentMapAverager based on cylinder bank
65 averager.start(s->cylinderNumber);
66
67 mapAveragingPin.setHigh();
69
71 action_s::make<endAveraging>(&averager));
72}
@ CUSTOM_ERR_6649
efitick_t scheduleByAngle(scheduling_s *timer, efitick_t nowNt, angle_t angle, action_s const &action)
Definition rpm_calculator.cpp:389
Here is the call graph for this function: