Detailed Description
Definition in file board_configuration.cpp.
Functions | |
| static void | setInjectorPins () |
| static void | setIgnitionPins () |
| static void | setupDefaultSensorInputs () |
| void | onBoardStandBy () |
| static void | hellen_honda_k_boardConfigOverrides () |
| static void | hellen_honda_k_boardDefaultConfiguration () |
| Board-specific configuration defaults. | |
| int | getBoardMetaOutputsCount () |
| int | getBoardMetaLowSideOutputsCount () |
| Gpio * | getBoardMetaOutputs () |
| void | setup_custom_board_overrides () |
Variables | |
| static Gpio | OUTPUTS [] |
Function Documentation
◆ getBoardMetaLowSideOutputsCount()
| int getBoardMetaLowSideOutputsCount | ( | ) |
Definition at line 181 of file board_configuration.cpp.

◆ getBoardMetaOutputs()
| Gpio * getBoardMetaOutputs | ( | ) |
Definition at line 185 of file board_configuration.cpp.
◆ getBoardMetaOutputsCount()
| int getBoardMetaOutputsCount | ( | ) |
Definition at line 177 of file board_configuration.cpp.
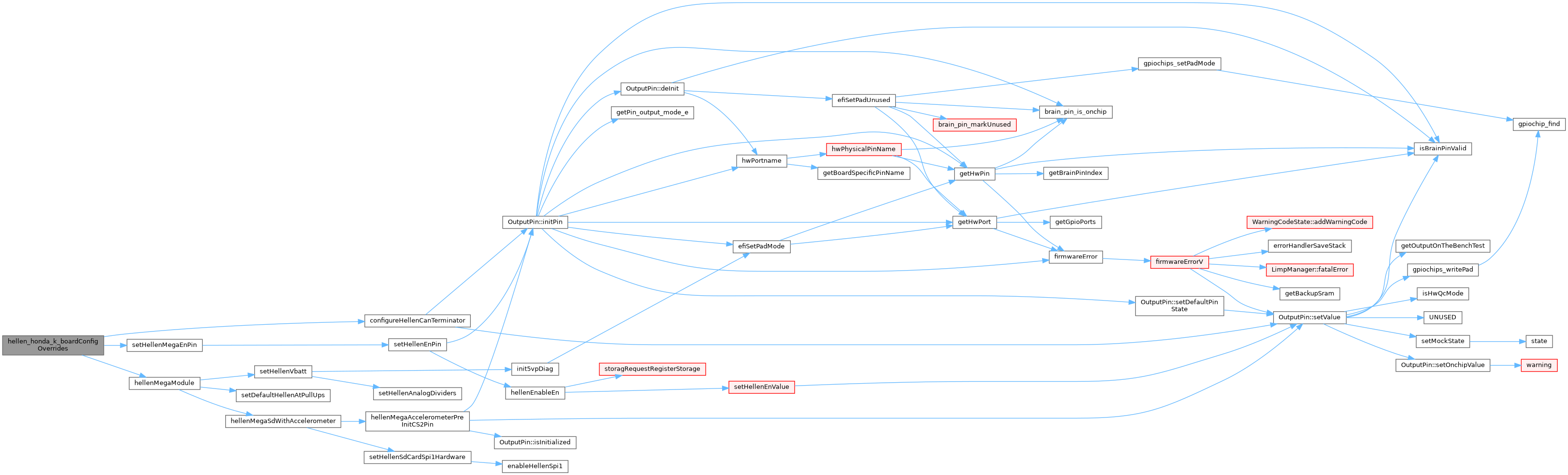
◆ hellen_honda_k_boardConfigOverrides()
|
static |
Definition at line 49 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

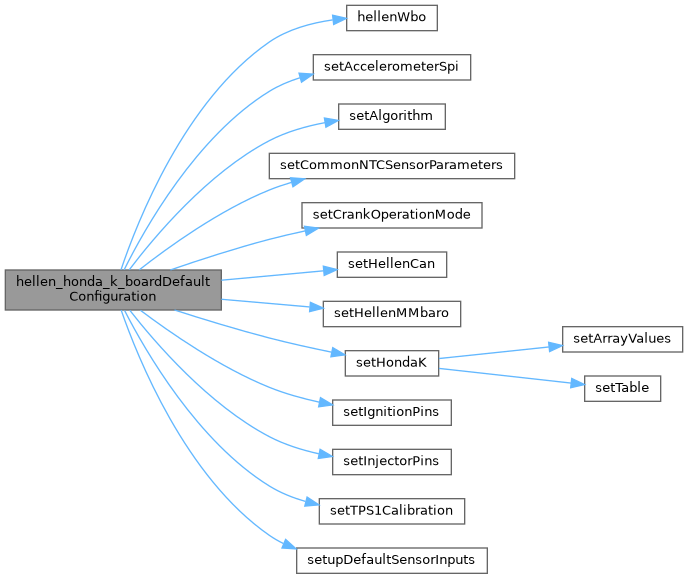
◆ hellen_honda_k_boardDefaultConfiguration()
|
static |
Board-specific configuration defaults.
Definition at line 81 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

◆ onBoardStandBy()
| void onBoardStandBy | ( | ) |
Definition at line 44 of file board_configuration.cpp.
Referenced by configureRusefiLuaUtilHooks().


◆ setIgnitionPins()
|
static |
Definition at line 22 of file board_configuration.cpp.
◆ setInjectorPins()
|
static |
Definition at line 15 of file board_configuration.cpp.
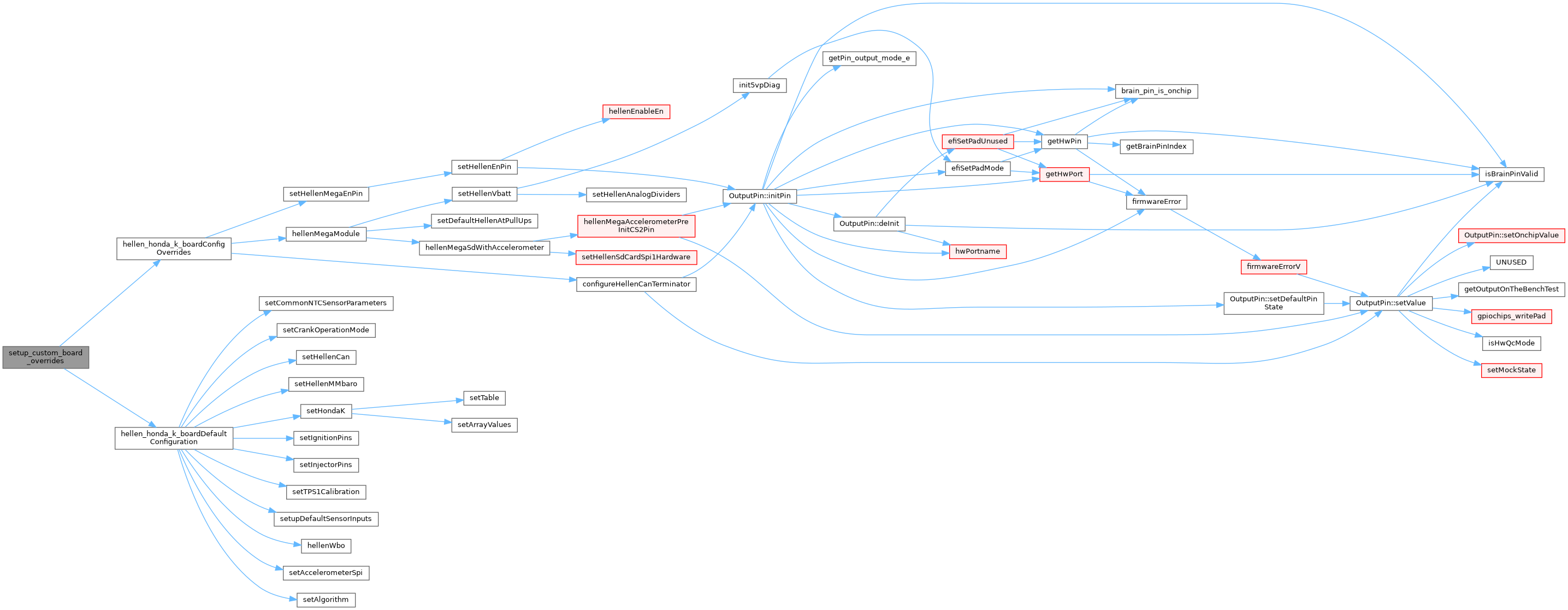
◆ setup_custom_board_overrides()
| void setup_custom_board_overrides | ( | ) |
Definition at line 189 of file board_configuration.cpp.
◆ setupDefaultSensorInputs()
|
static |
Definition at line 29 of file board_configuration.cpp.
Variable Documentation
◆ OUTPUTS
|
static |
Definition at line 150 of file board_configuration.cpp.