Functions | |
| void | processCanQcBenchTest (const CANRxFrame &frame) |
| void | sendQcBenchEventCounters (size_t bus=0) |
| void | sendQcBenchButtonCounters () |
| void | sendQcBenchAuxDigitalCounters () |
| void | sendQcBenchRawAnalogValues (size_t bus=0) |
| void | sendQcBenchBoardStatus (size_t bus=0) |
| void | initQcBenchControls () |
Function Documentation
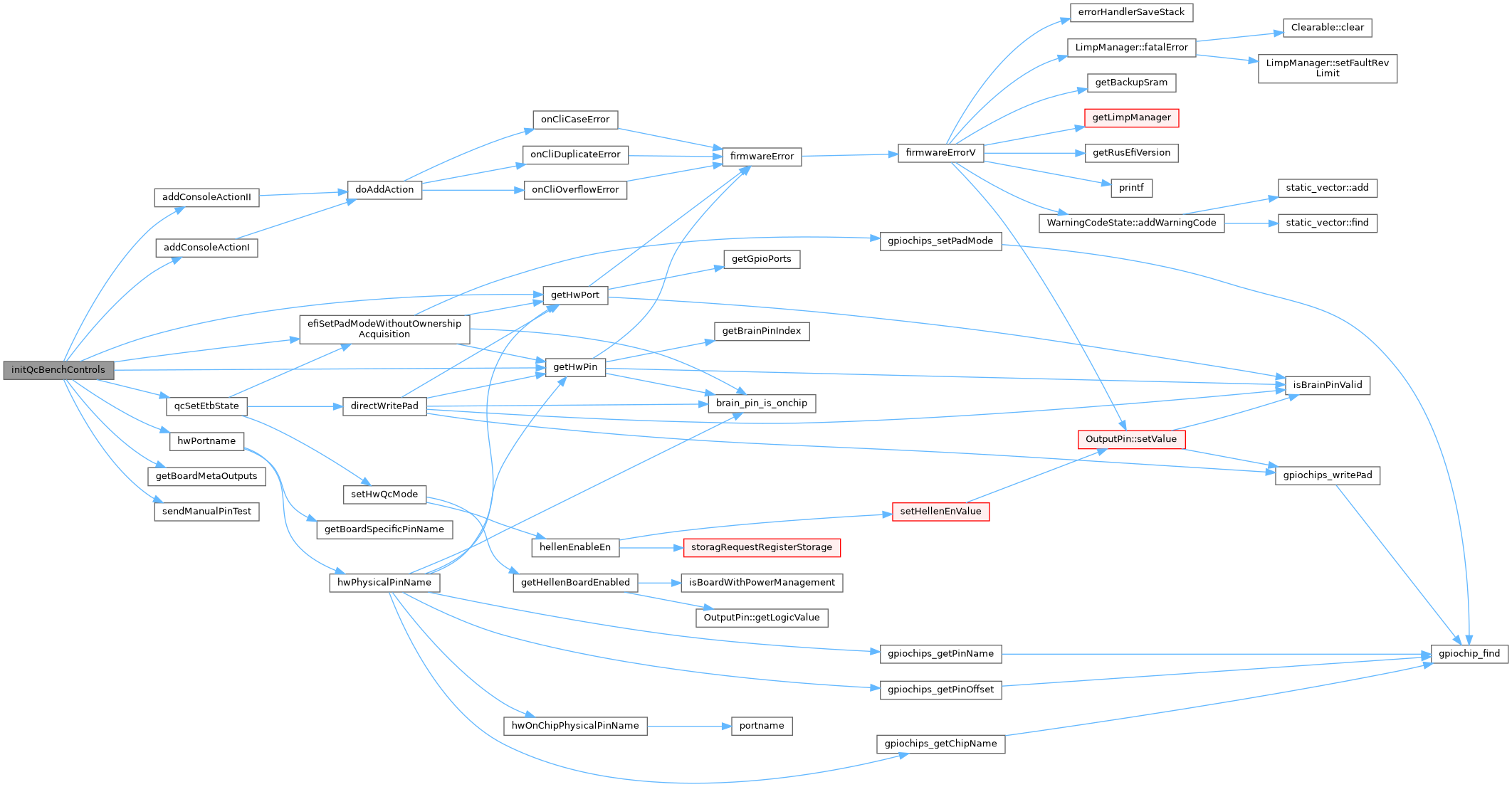
◆ initQcBenchControls()
| void initQcBenchControls | ( | ) |
Definition at line 341 of file can_bench_test.cpp.
341 {
342#if EFI_CAN_SUPPORT && EFI_PROD_CODE
344 qcSetEtbState(index, direction);
345 });
346
349 criticalAssertVoid(boardOutputs != nullptr, "outputs not defined");
352
356 sendManualPinTest(index);
357 });
358#endif // EFI_PROD_CODE
359}
static void qcSetEtbState(uint8_t dcIndex, uint8_t direction)
Definition can_bench_test.cpp:78
void addConsoleActionII(const char *token, VoidIntInt callback)
Register a console command with two Integer parameters.
Definition cli_registry.cpp:109
void addConsoleActionI(const char *token, VoidInt callback)
Register a console command with one Integer parameter.
Definition cli_registry.cpp:98
void efiSetPadModeWithoutOwnershipAcquisition(const char *msg, brain_pin_e brainPin, iomode_t mode)
Definition io_pins.cpp:61
Referenced by commonEarlyInit().
Here is the call graph for this function:
Here is the caller graph for this function:

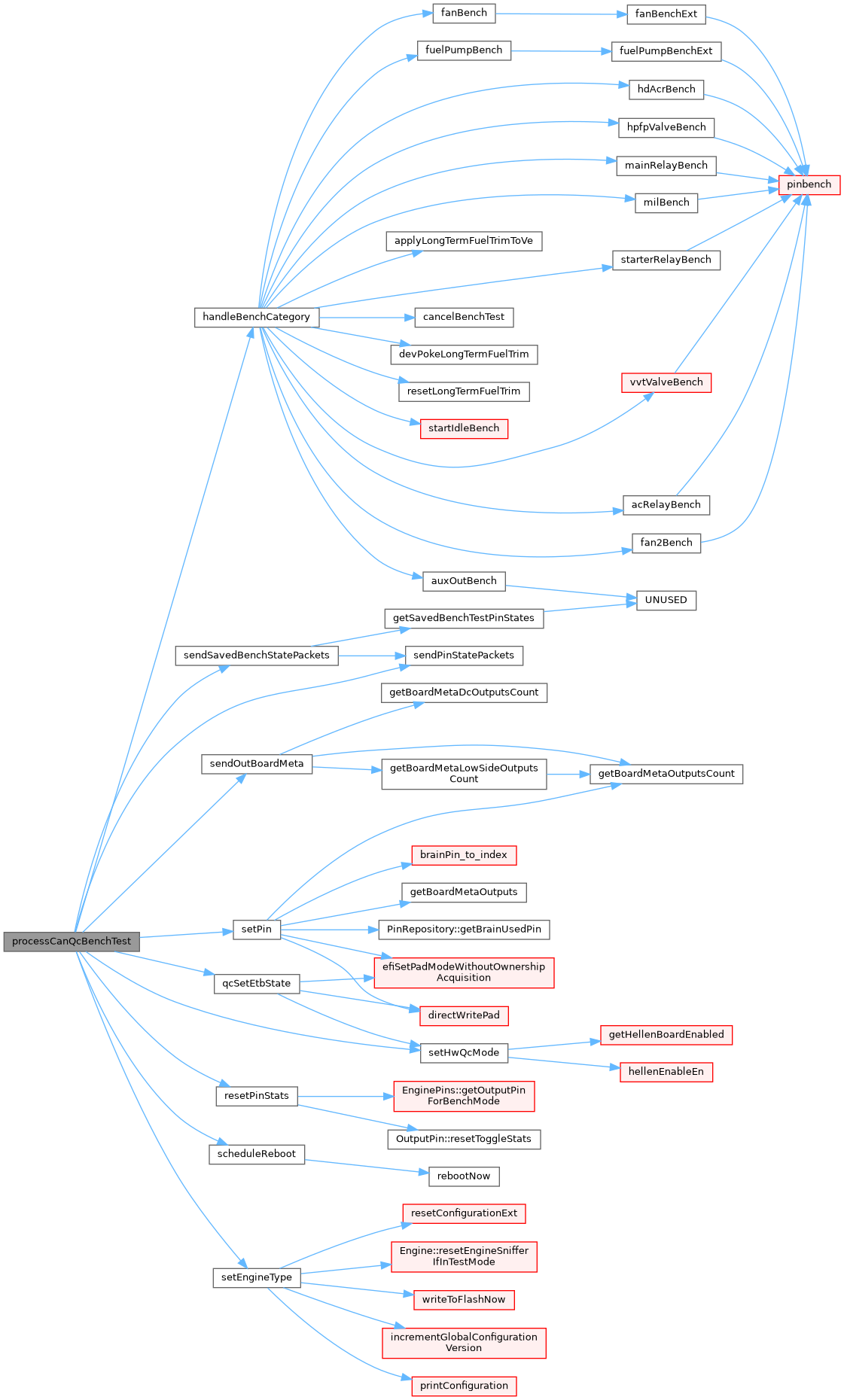
◆ processCanQcBenchTest()
| void processCanQcBenchTest | ( | const CANRxFrame & | frame | ) |
file can_bench_test.h
Definition at line 298 of file can_bench_test.cpp.
298 {
299 if (CAN_EID(frame) != (int)bench_test_packet_ids_e::HW_QC_IO_CONTROL) {
300 return;
301 }
303 return;
304 }
305 setHwQcMode();
306 bench_test_io_control_e command = (bench_test_io_control_e)frame.data8[1];
307 if (command == bench_test_io_control_e::CAN_BENCH_GET_COUNT) {
308 sendOutBoardMeta(0);
309 } else if (command == bench_test_io_control_e::CAN_QC_OUTPUT_CONTROL_SET) {
310 // see also "bench_setpin" console command
311 setPin(frame, 1);
312 } else if (command == bench_test_io_control_e::CAN_QC_OUTPUT_CONTROL_CLEAR) {
313 setPin(frame, 0);
314 } else if (command == bench_test_io_control_e::CAN_QC_ETB) {
315 uint8_t dcIndex = frame.data8[2];
316 uint8_t direction = frame.data8[3];
317 qcSetEtbState(dcIndex, direction);
318 } else if (command == bench_test_io_control_e::CAN_BENCH_SET_ENGINE_TYPE) {
320 // todo: fix firmware for 'false' to be possible - i.e. more of properties should be applied on the fly
322#if EFI_PROD_CODE
323 scheduleReboot();
324#endif // EFI_PROD_CODE
325} else if (command == bench_test_io_control_e::CAN_BENCH_START_PIN_TEST) {
327 // ignore previous pin state and stats
328 resetPinStats(benchModePinIdx);
329 } else if (command == bench_test_io_control_e::CAN_BENCH_END_PIN_TEST) {
330 sendSavedBenchStatePackets();
331 } else if (command == bench_test_io_control_e::CAN_BENCH_EXECUTE_BENCH_TEST) {
333 handleBenchCategory(benchCommandIdx);
334 } else if (command == bench_test_io_control_e::CAN_BENCH_QUERY_PIN_STATE) {
336 sendPinStatePackets(benchModePinIdx);
337 }
338}
static void resetPinStats(bench_mode_e benchModePinIdx)
Definition can_bench_test.cpp:287
static void sendPinStatePackets(int pinToggleCounter, uint32_t durationsInStateMs[2])
Definition can_bench_test.cpp:259
Referenced by processCanRxMessage().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ sendQcBenchAuxDigitalCounters()
| void sendQcBenchAuxDigitalCounters | ( | ) |
Definition at line 155 of file can_bench_test.cpp.
155 {
156 CanTxMessage msg(CanCategory::BENCH_TEST, (int)bench_test_packet_ids_e::AUX_DIGITAL_COUNTERS, 8, /*bus*/0, /*isExtended*/true);
157 for (int i =0;i<LUA_DIGITAL_INPUT_COUNT;i++) {
159 }
160}
@ BENCH_TEST
Definition can_msg_tx.h:32
SimpleSwitchedState luaDigitalInputState[LUA_DIGITAL_INPUT_COUNT]
Definition engine.h:221
Referenced by CanWrite::PeriodicTask().
Here is the call graph for this function:

Here is the caller graph for this function:

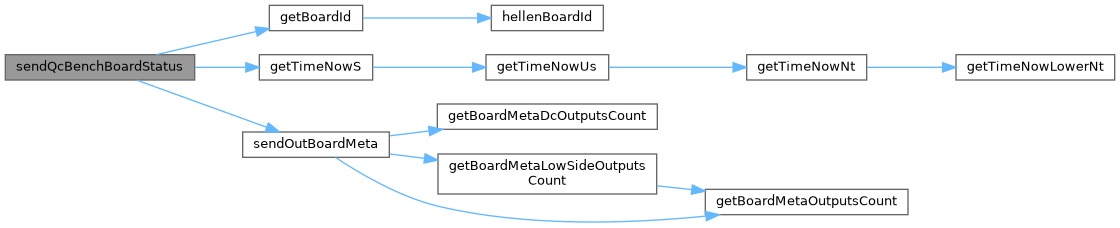
◆ sendQcBenchBoardStatus()
| void sendQcBenchBoardStatus | ( | size_t | bus = 0 | ) |
Definition at line 232 of file can_bench_test.cpp.
232 {
233#if EFI_PROD_CODE
234 CanTxMessage msg(CanCategory::BENCH_TEST, (int)bench_test_packet_ids_e::BOARD_STATUS, 8, bus, /*isExtended*/true);
235
237 msg[0] = TRUNCATE_TO_BYTE(boardId >> 8);
238 msg[1] = TRUNCATE_TO_BYTE(boardId);
239
241 msg[2] = TRUNCATE_TO_BYTE(numSecondsSinceReset >> 16);
242 msg[3] = TRUNCATE_TO_BYTE(numSecondsSinceReset >> 8);
243 msg[4] = TRUNCATE_TO_BYTE(numSecondsSinceReset);
244
246 msg[5] = engineType >> 8;
247 msg[6] = engineType;
248 sendOutBoardMeta(bus);
249#endif // EFI_PROD_CODE
250}
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
engine_type_e engineType
Referenced by CanWrite::PeriodicTask().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ sendQcBenchButtonCounters()
| void sendQcBenchButtonCounters | ( | ) |
Definition at line 147 of file can_bench_test.cpp.
147 {
148 CanTxMessage msg(CanCategory::BENCH_TEST, (int)bench_test_packet_ids_e::BUTTON_COUNTERS, 8, /*bus*/0, /*isExtended*/true);
152 // todo: start button
153}
Referenced by CanWrite::PeriodicTask().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ sendQcBenchEventCounters()
| void sendQcBenchEventCounters | ( | size_t | bus = 0 | ) |
Definition at line 120 of file can_bench_test.cpp.
120 {
121#if EFI_SHAFT_POSITION_INPUT
122 CanTxMessage msg(CanCategory::BENCH_TEST, (int)bench_test_packet_ids_e::EVENT_COUNTERS, 8, bus, /*isExtended*/true);
123
128
129 msg[0] = TRUNCATE_TO_BYTE(primaryRise + primaryFall);
130 msg[1] = TRUNCATE_TO_BYTE(secondaryRise + secondaryFall);
131
132 for (int camIdx = 0; camIdx < 4; camIdx++) {
133 int vvtRise = 0, vvtFall = 0;
134 if (camIdx < CAM_INPUTS_COUNT) {
137 }
138
139 msg[2 + camIdx] = TRUNCATE_TO_BYTE(vvtRise + vvtFall);
140 }
141
144#endif // EFI_SHAFT_POSITION_INPUT
145}
Definition frequency_sensor.h:8
int getHwEventCounter(int index) const
Definition trigger_central.cpp:54
FrequencySensor vehicleSpeedSensor(SensorType::VehicleSpeed, MS2NT(500))
uint16_t vvtEventRiseCounter[CAM_INPUTS_COUNT]
Definition trigger_central_generated.h:16
uint16_t vvtEventFallCounter[CAM_INPUTS_COUNT]
Definition trigger_central_generated.h:20
Referenced by CanWrite::PeriodicTask().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ sendQcBenchRawAnalogValues()
| void sendQcBenchRawAnalogValues | ( | size_t | bus = 0 | ) |
Definition at line 162 of file can_bench_test.cpp.
162 {
163 const float values_1[] = {
172 };
173
174 const float values_2[] = {
183 };
184 const float lua_values_1[] = {
193 };
194 static_assert(efi::size(values_1) <= 8);
195 static_assert(efi::size(values_2) <= 8);
196 static_assert(efi::size(lua_values_1) <= 8);
197
198
199 // send the first packet
200 {
201 CanTxMessage msg(CanCategory::BENCH_TEST, (int)bench_test_packet_ids_e::RAW_ANALOG_1, 8, bus, /*isExtended*/true);
202 for (size_t valueIdx = 0; valueIdx < efi::size(values_1); valueIdx++) {
203 msg[valueIdx] = RAW_TO_BYTE(values_1[valueIdx]);
204 }
205 }
206 {
207 CanTxMessage msg(CanCategory::BENCH_TEST, (int)bench_test_packet_ids_e::RAW_ANALOG_2, 8, bus, /*isExtended*/true);
208 for (size_t valueIdx = 0; valueIdx < efi::size(values_2); valueIdx++) {
209 msg[valueIdx] = RAW_TO_BYTE(values_2[valueIdx]);
210 }
211 }
212 // todo: time to extract method already?
213 {
214 CanTxMessage msg(CanCategory::BENCH_TEST, (int)bench_test_packet_ids_e::RAW_LUA_ANALOG_1, 8, bus, /*isExtended*/true);
215 for (size_t valueIdx = 0; valueIdx < efi::size(lua_values_1); valueIdx++) {
216 msg[valueIdx] = RAW_TO_BYTE(lua_values_1[valueIdx]);
217 }
218 }
219}
@ AuxAnalog8
@ MapSlow
@ FuelPressureHigh
@ BatteryVoltage
@ AuxAnalog3
@ FuelPressureLow
@ Tps1Secondary
@ Iat
@ AcceleratorPedalPrimary
@ AuxAnalog2
@ AuxAnalog1
@ AuxTemp1
@ Tps2Secondary
@ AuxAnalog5
@ OilPressure
@ AcceleratorPedalSecondary
@ Clt
@ Tps2Primary
@ AuxAnalog7
@ AuxLinear1
@ AuxAnalog6
@ AuxLinear2
@ Tps1Primary
@ AuxAnalog4
Referenced by CanWrite::PeriodicTask().
Here is the call graph for this function:

Here is the caller graph for this function:
