Functions | |
| static void | setInjectorPins () |
| static void | setIgnitionPins () |
| static void | setupDefaultSensorInputs () |
| static void | hellen154hyundai_f7_boardConfigOverrides () |
| static void | hellen154hyundai_f7_boardDefaultConfiguration () |
| Board-specific configuration defaults. | |
| static void | hellen154hyundai_f7_boardInitHardware () |
| int | getBoardMetaOutputsCount () |
| int | getBoardMetaLowSideOutputsCount () |
| int | getBoardMetaDcOutputsCount () |
| Gpio * | getBoardMetaOutputs () |
| void | setup_custom_board_overrides () |
Variables | |
| static struct tle9201_config | tle9201 |
| static Gpio | OUTPUTS [] |
| static const struct mc33810_config | mc33810 |
Function Documentation
◆ getBoardMetaDcOutputsCount()
| int getBoardMetaDcOutputsCount | ( | ) |
Definition at line 227 of file board_configuration.cpp.
◆ getBoardMetaLowSideOutputsCount()
| int getBoardMetaLowSideOutputsCount | ( | ) |
Definition at line 223 of file board_configuration.cpp.

◆ getBoardMetaOutputs()
| Gpio * getBoardMetaOutputs | ( | ) |
Definition at line 231 of file board_configuration.cpp.
◆ getBoardMetaOutputsCount()
| int getBoardMetaOutputsCount | ( | ) |
Definition at line 219 of file board_configuration.cpp.
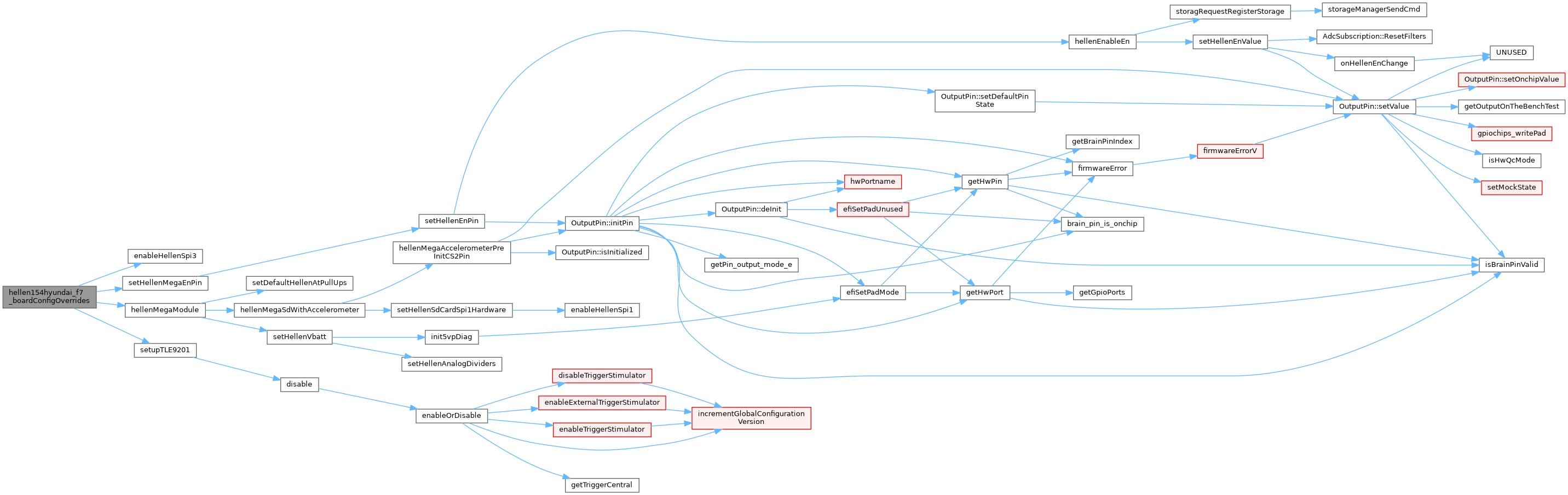
◆ hellen154hyundai_f7_boardConfigOverrides()
|
static |
Definition at line 69 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

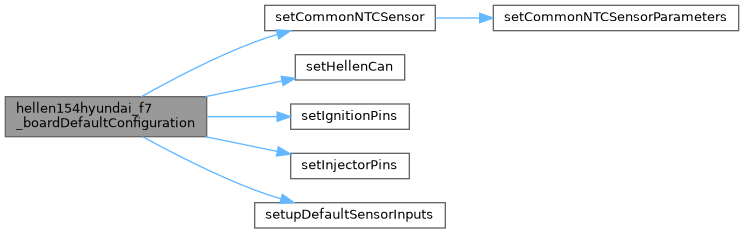
◆ hellen154hyundai_f7_boardDefaultConfiguration()
|
static |
Board-specific configuration defaults.
Definition at line 100 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

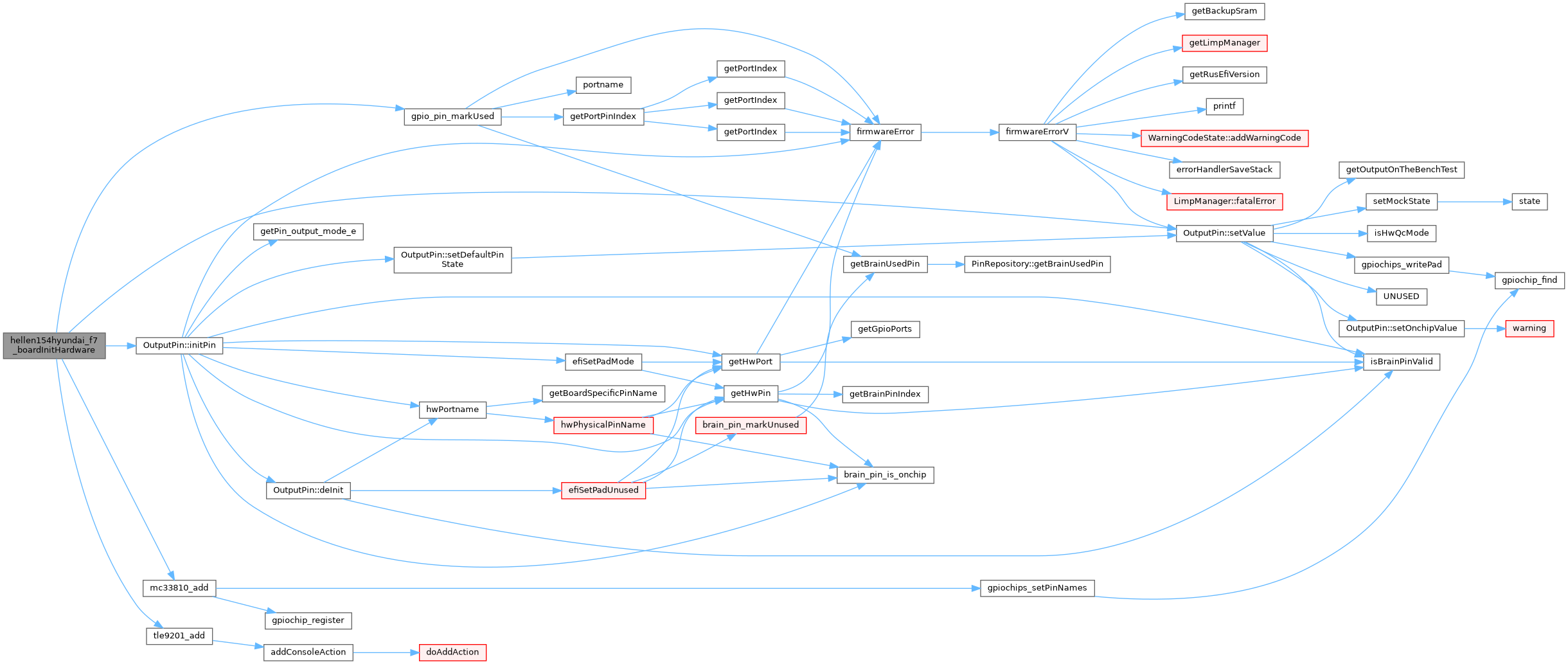
◆ hellen154hyundai_f7_boardInitHardware()
|
static |
Definition at line 193 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

◆ setIgnitionPins()
|
static |
Definition at line 25 of file board_configuration.cpp.
◆ setInjectorPins()
|
static |
Definition at line 18 of file board_configuration.cpp.
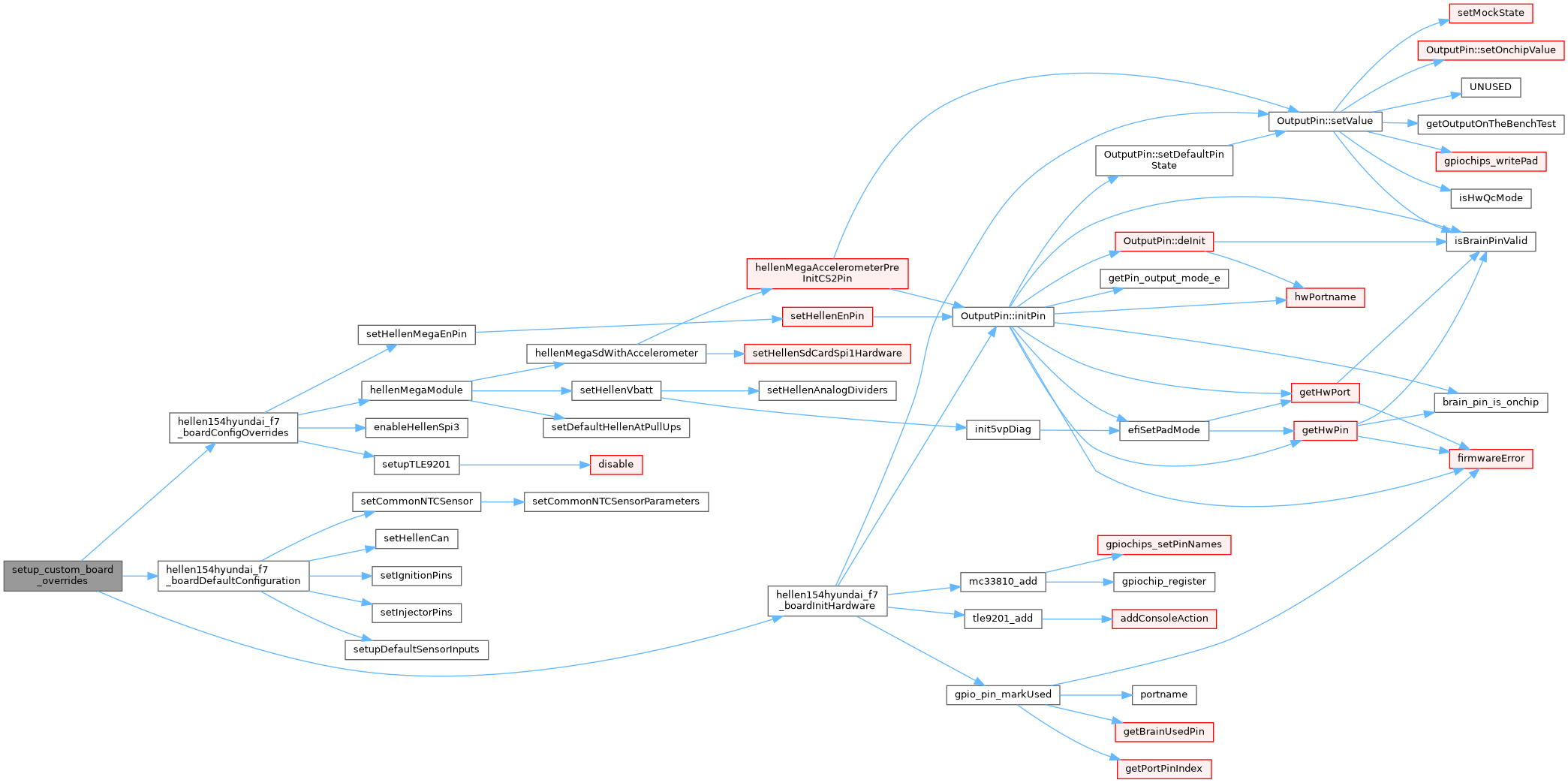
◆ setup_custom_board_overrides()
| void setup_custom_board_overrides | ( | ) |
Definition at line 235 of file board_configuration.cpp.
◆ setupDefaultSensorInputs()
|
static |
Definition at line 32 of file board_configuration.cpp.

Variable Documentation
◆ mc33810
|
static |
Definition at line 149 of file board_configuration.cpp.
Referenced by f407_discovery_boardInitHardware(), and hellen154hyundai_f7_boardInitHardware().
◆ OUTPUTS
|
static |
Definition at line 127 of file board_configuration.cpp.
◆ tle9201
|
static |
Definition at line 50 of file board_configuration.cpp.
Referenced by hellen154hyundai_f7_boardInitHardware().