Detailed Description
See https://rusefi.com/s/uaefi
Definition in file board_configuration.cpp.
Functions | |
| static void | setInjectorPins () |
| static void | setIgnitionPins () |
| static void | setupDefaultSensorInputs () |
| static void | uaefi_boardConfigOverrides () |
| bool | validateBoardConfig () |
| void | setUaefiDefaultETBPins () |
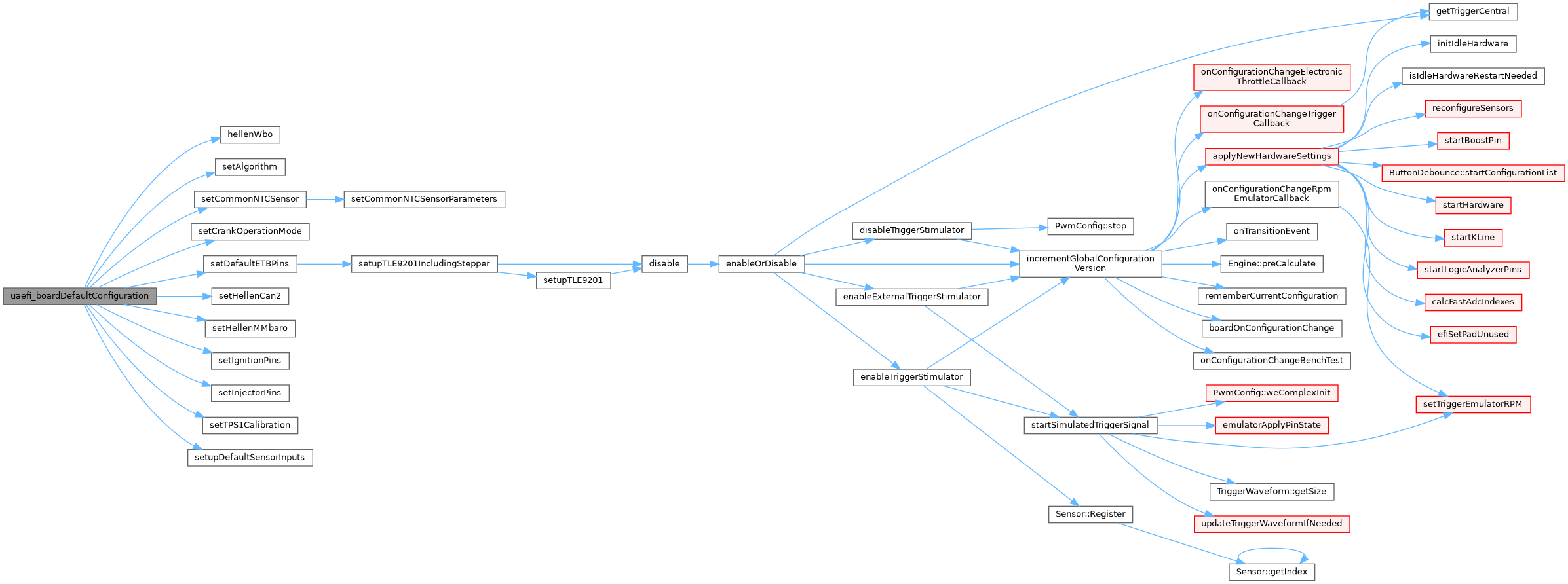
| static void | uaefi_boardDefaultConfiguration () |
| Board-specific configuration defaults. | |
| int | getBoardMetaOutputsCount () |
| int | getBoardMetaLowSideOutputsCount () |
| Gpio * | getBoardMetaOutputs () |
| int | getBoardMetaDcOutputsCount () |
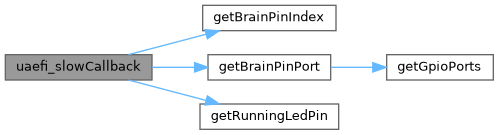
| static void | uaefi_slowCallback () |
| void | setup_custom_board_overrides () |
| int | boardGetAnalogInputDiagnostic (adc_channel_e hwChannel, float voltage) |
Variables | |
| static Gpio | OUTPUTS [] |
Function Documentation
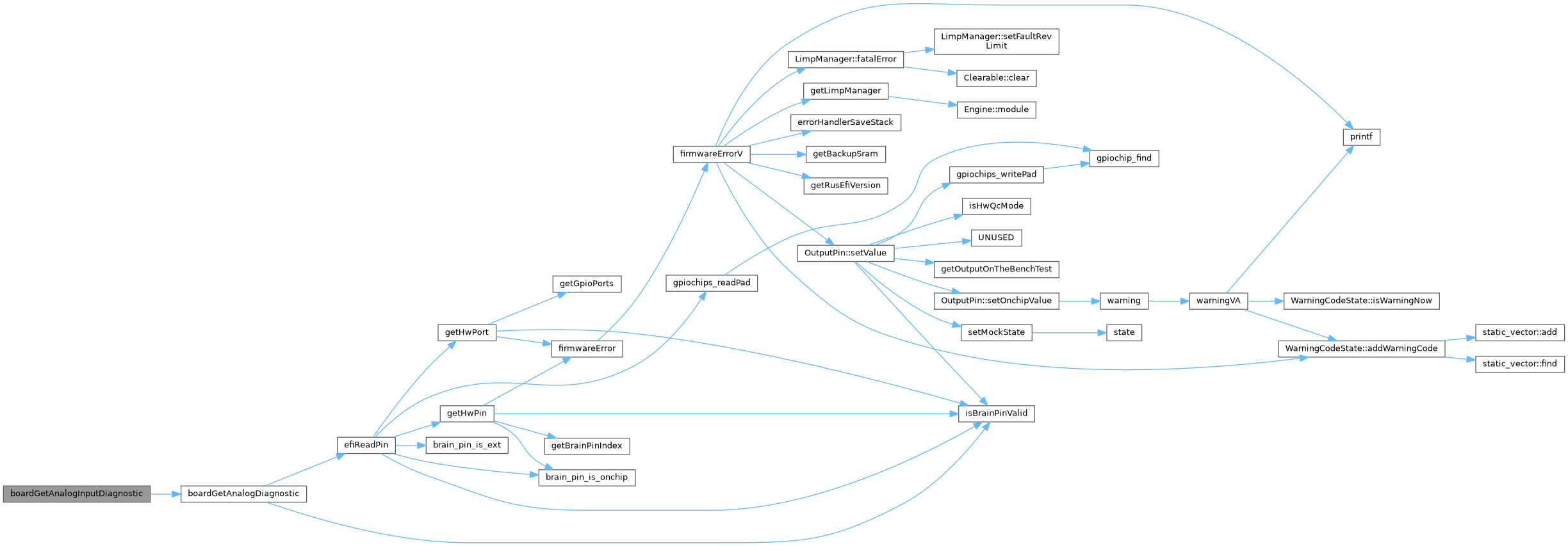
◆ boardGetAnalogInputDiagnostic()
| int boardGetAnalogInputDiagnostic | ( | adc_channel_e | hwChannel, |
| float | voltage | ||
| ) |
Definition at line 207 of file board_configuration.cpp.
◆ getBoardMetaDcOutputsCount()
| int getBoardMetaDcOutputsCount | ( | ) |
Definition at line 177 of file board_configuration.cpp.
◆ getBoardMetaLowSideOutputsCount()
| int getBoardMetaLowSideOutputsCount | ( | ) |
Definition at line 169 of file board_configuration.cpp.

◆ getBoardMetaOutputs()
| Gpio * getBoardMetaOutputs | ( | ) |
Definition at line 173 of file board_configuration.cpp.
◆ getBoardMetaOutputsCount()
| int getBoardMetaOutputsCount | ( | ) |
Definition at line 165 of file board_configuration.cpp.
◆ setIgnitionPins()
|
static |
Definition at line 28 of file board_configuration.cpp.
◆ setInjectorPins()
|
static |
Definition at line 19 of file board_configuration.cpp.
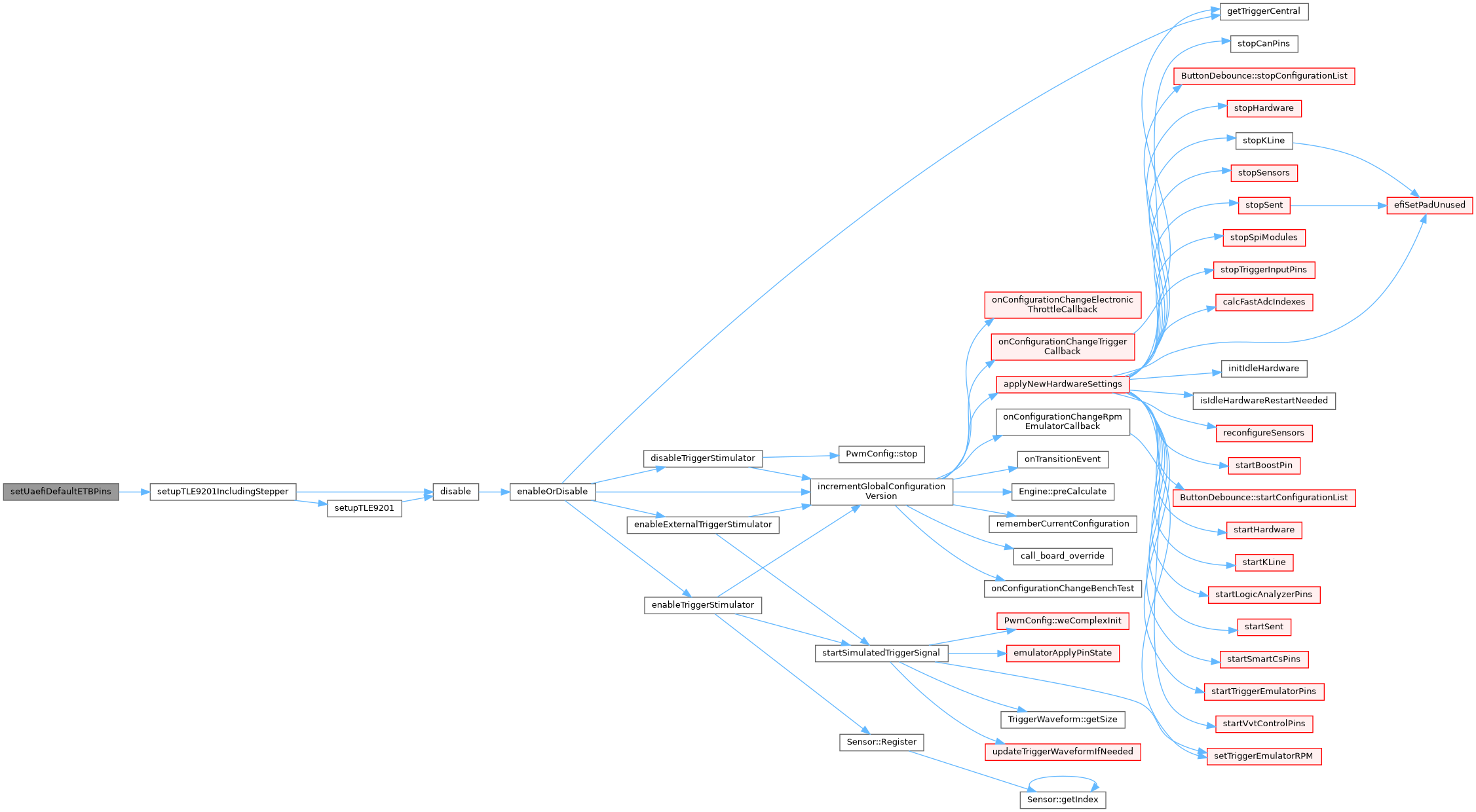
◆ setUaefiDefaultETBPins()
| void setUaefiDefaultETBPins | ( | ) |
Definition at line 75 of file board_configuration.cpp.
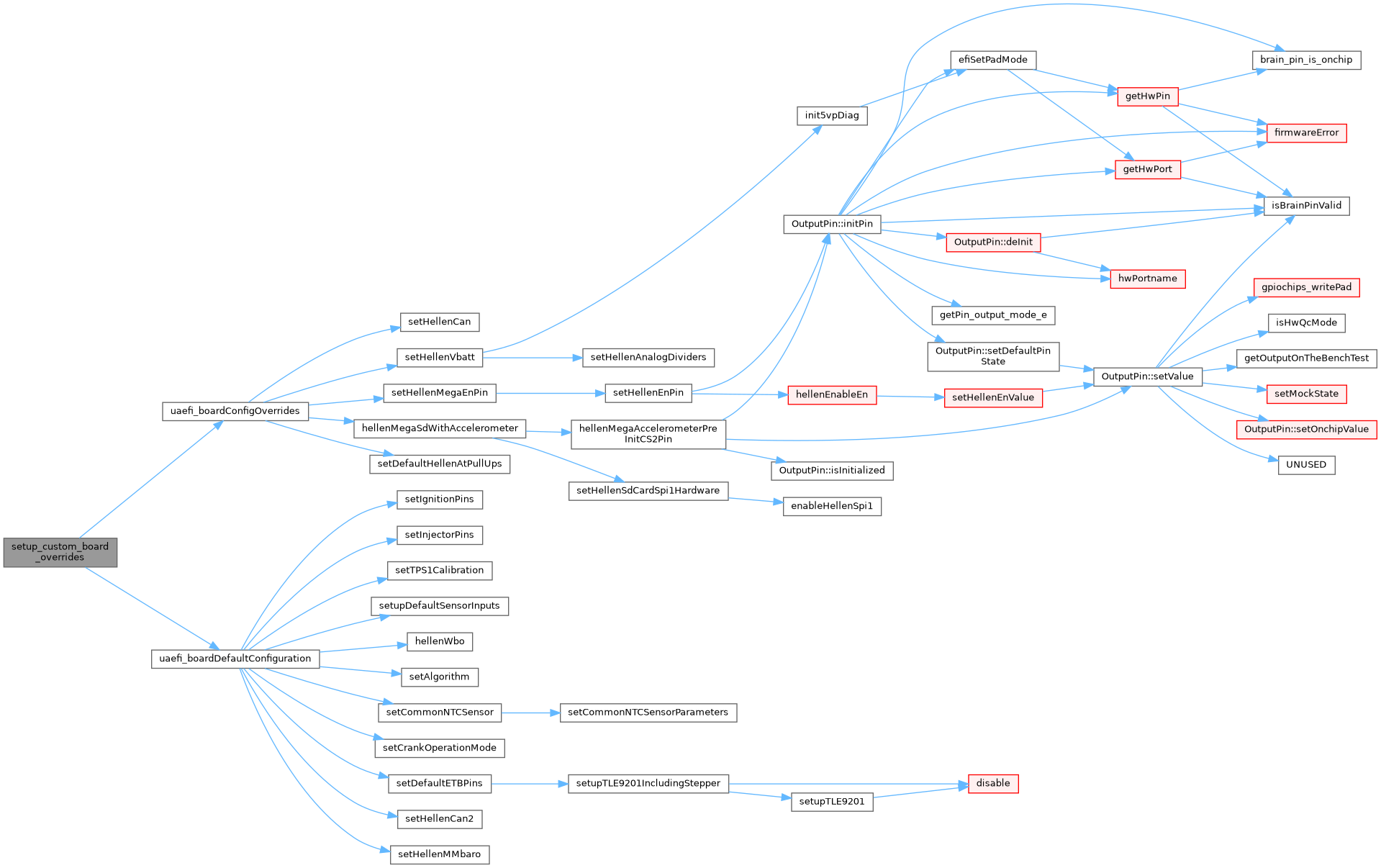
◆ setup_custom_board_overrides()
| void setup_custom_board_overrides | ( | ) |
Definition at line 201 of file board_configuration.cpp.
◆ setupDefaultSensorInputs()
|
static |
Definition at line 37 of file board_configuration.cpp.

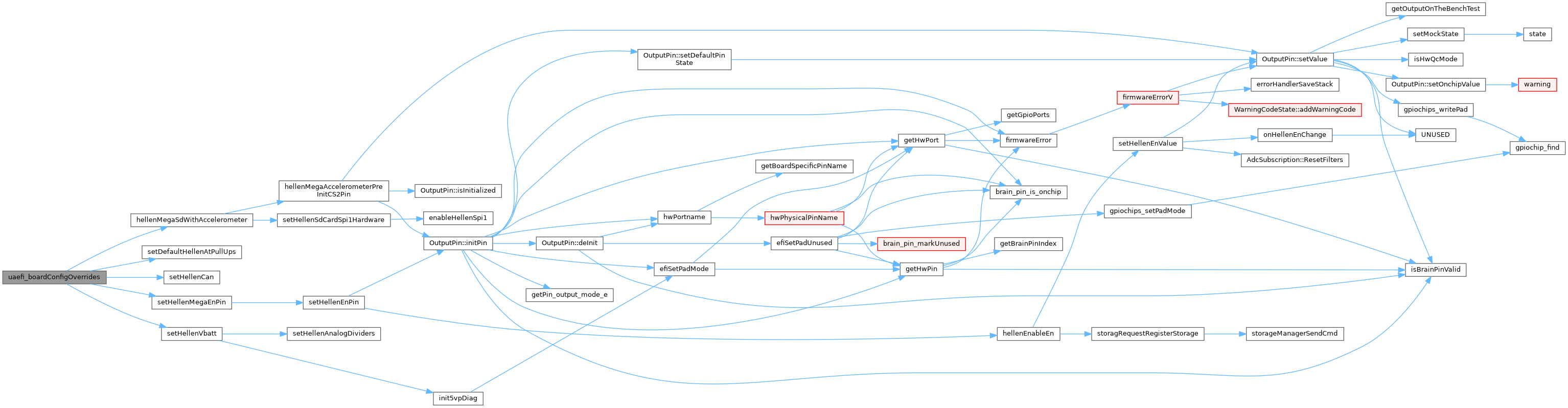
◆ uaefi_boardConfigOverrides()
|
static |
Definition at line 54 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

◆ uaefi_boardDefaultConfiguration()
|
static |
Board-specific configuration defaults.
Definition at line 87 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

◆ uaefi_slowCallback()
|
static |
Definition at line 189 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

◆ validateBoardConfig()
| bool validateBoardConfig | ( | ) |
Definition at line 68 of file board_configuration.cpp.

Variable Documentation
◆ OUTPUTS
|
static |
Definition at line 143 of file board_configuration.cpp.