Detailed Description
Functions | |
| void | rebootNow () |
| void | scheduleReboot () |
| void | onAssertionFailure () |
| void | initEfiWithConfig () |
| __NO_RETURN void | runMainLoop () |
| void | runRusEfi () |
| void | chDbgStackOverflowPanic (thread_t *otp) |
Variables | |
| bool | main_loop_started = false |
| static char | panicMessage [200] |
| static virtual_timer_t | resetTimer |
| static jmp_buf | jmpEnv |
Function Documentation
◆ chDbgStackOverflowPanic()
| void chDbgStackOverflowPanic | ( | thread_t * | otp | ) |
this depends on chcore.h patch +void chDbgStackOverflowPanic(thread_t *otp);
- chSysHalt("stack overflow"); \
- chDbgStackOverflowPanic(otp); \
Definition at line 315 of file rusefi.cpp.

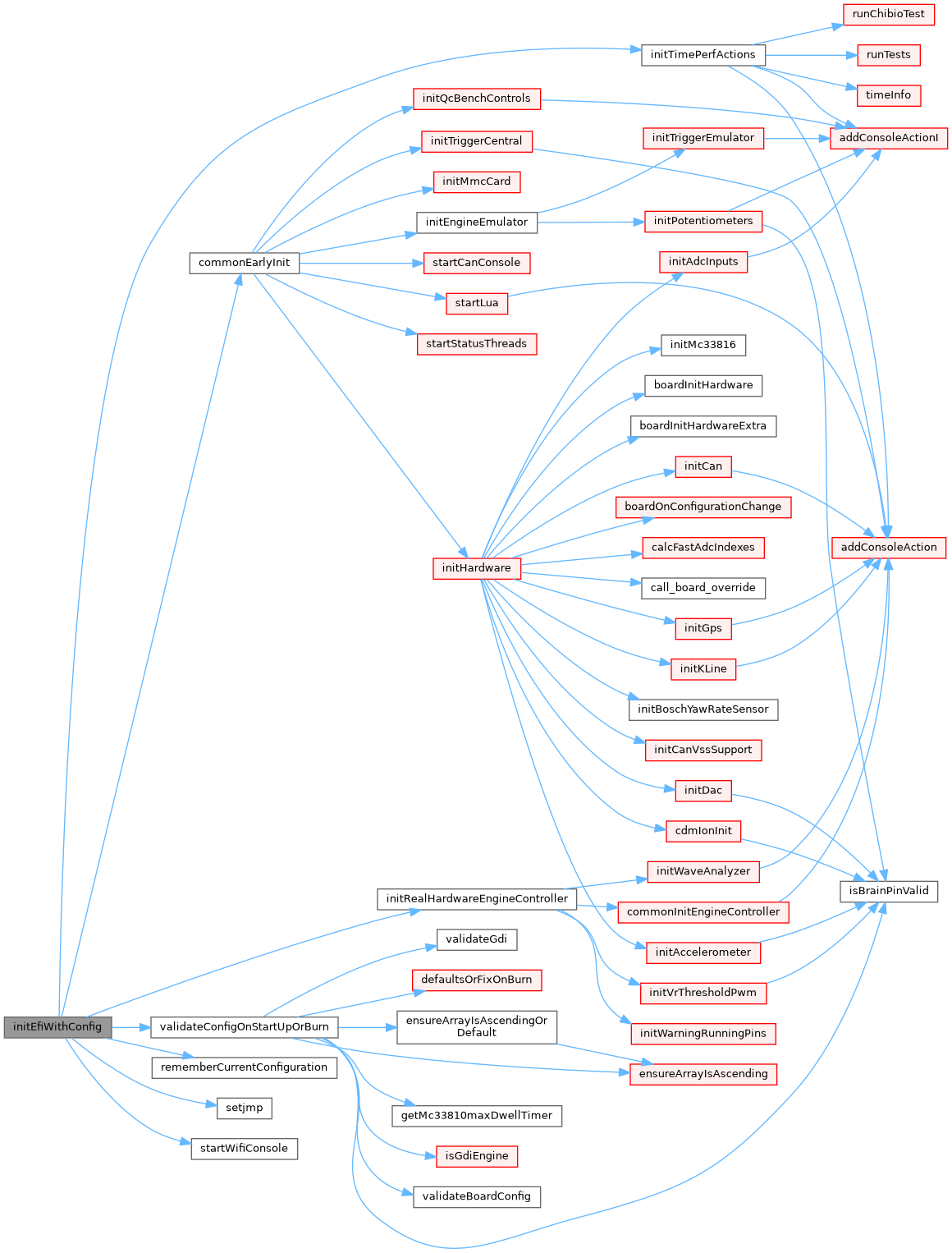
◆ initEfiWithConfig()
| void initEfiWithConfig | ( | ) |
Now let's initialize actual engine control logic todo: should we initialize some? most? controllers before hardware?
Definition at line 254 of file rusefi.cpp.
Referenced by runRusEfi().

◆ onAssertionFailure()
| void onAssertionFailure | ( | ) |
Definition at line 165 of file rusefi.cpp.
Referenced by chDbgPanic3().


◆ rebootNow()
| void rebootNow | ( | ) |
Definition at line 150 of file rusefi.cpp.
Referenced by executeTSCommand(), and scheduleReboot().

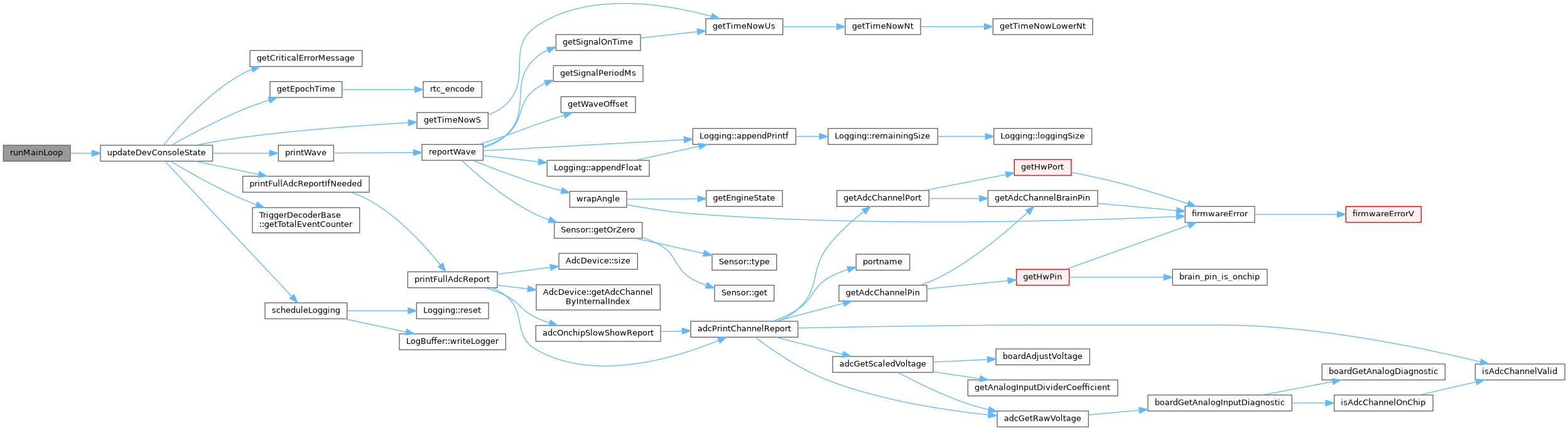
◆ runMainLoop()
| void runMainLoop | ( | ) |
This loop is the closes we have to 'main loop' - but here we only publish the status. The main logic of engine control is around main_trigger_callback
Definition at line 288 of file rusefi.cpp.
Referenced by runRusEfi().

◆ runRusEfi()
| void runRusEfi | ( | ) |
we need to initialize table objects before default configuration can set values
Next we should initialize serial port console, it's important to know what's going on
Definition at line 174 of file rusefi.cpp.
Referenced by main().


◆ scheduleReboot()
| void scheduleReboot | ( | ) |
Some configuration changes require full firmware reset. Once day we will write graceful shutdown, but that would be one day.
Definition at line 158 of file rusefi.cpp.
Referenced by processCanQcBenchTest(), runRusEfi(), and unlockEcu().


Variable Documentation
◆ jmpEnv
|
static |
Definition at line 164 of file rusefi.cpp.
Referenced by initEfiWithConfig(), and onAssertionFailure().
◆ main_loop_started
| bool main_loop_started = false |
Definition at line 143 of file rusefi.cpp.
Referenced by runMainLoop(), tooSoonToHandleSignal(), and MLG::writeSdLogLine().
◆ panicMessage
|
static |
Definition at line 145 of file rusefi.cpp.
Referenced by chDbgStackOverflowPanic().
◆ resetTimer
|
static |
Definition at line 147 of file rusefi.cpp.
Referenced by scheduleReboot().