Detailed Description
- Date
- Mar 27, 2013
This file is part of rusEfi - see http://rusefi.com
rusEfi is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation; either version 3 of the License, or (at your option) any later version.
rusEfi is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.
Definition in file ignition_state.cpp.
Functions | |
| angle_t | getRunningAdvance (float rpm, float engineLoad) |
| angle_t | getCltTimingCorrection (float engineLoad) |
| angle_t | getAdvanceCorrections (float engineLoad) |
| angle_t | getCrankingAdvance (float rpm, float engineLoad) |
| PUBLIC_API_WEAK_SOMETHING_WEIRD angle_t | getCylinderIgnitionTrim (size_t cylinderNumber, float rpm, float ignitionLoad) |
| size_t | getMultiSparkCount (float rpm) |
| void | initIgnitionAdvanceControl () |
Variables | |
| static Map3D< TRACTION_CONTROL_ETB_DROP_SLIP_SIZE, TRACTION_CONTROL_ETB_DROP_SPEED_SIZE, int8_t, uint16_t, uint8_t > | tcTimingDropTable {"tct"} |
| static Map3D< TRACTION_CONTROL_ETB_DROP_SLIP_SIZE, TRACTION_CONTROL_ETB_DROP_SPEED_SIZE, int8_t, uint16_t, uint8_t > | tcSparkSkipTable {"tcs"} |
Function Documentation
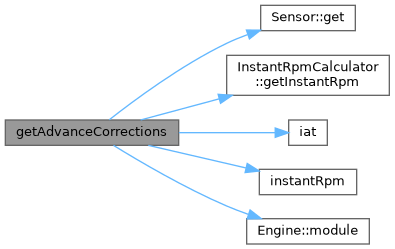
◆ getAdvanceCorrections()
Definition at line 164 of file ignition_state.cpp.
Referenced by IgnitionState::getAdvance().

◆ getCltTimingCorrection()
Definition at line 147 of file ignition_state.cpp.
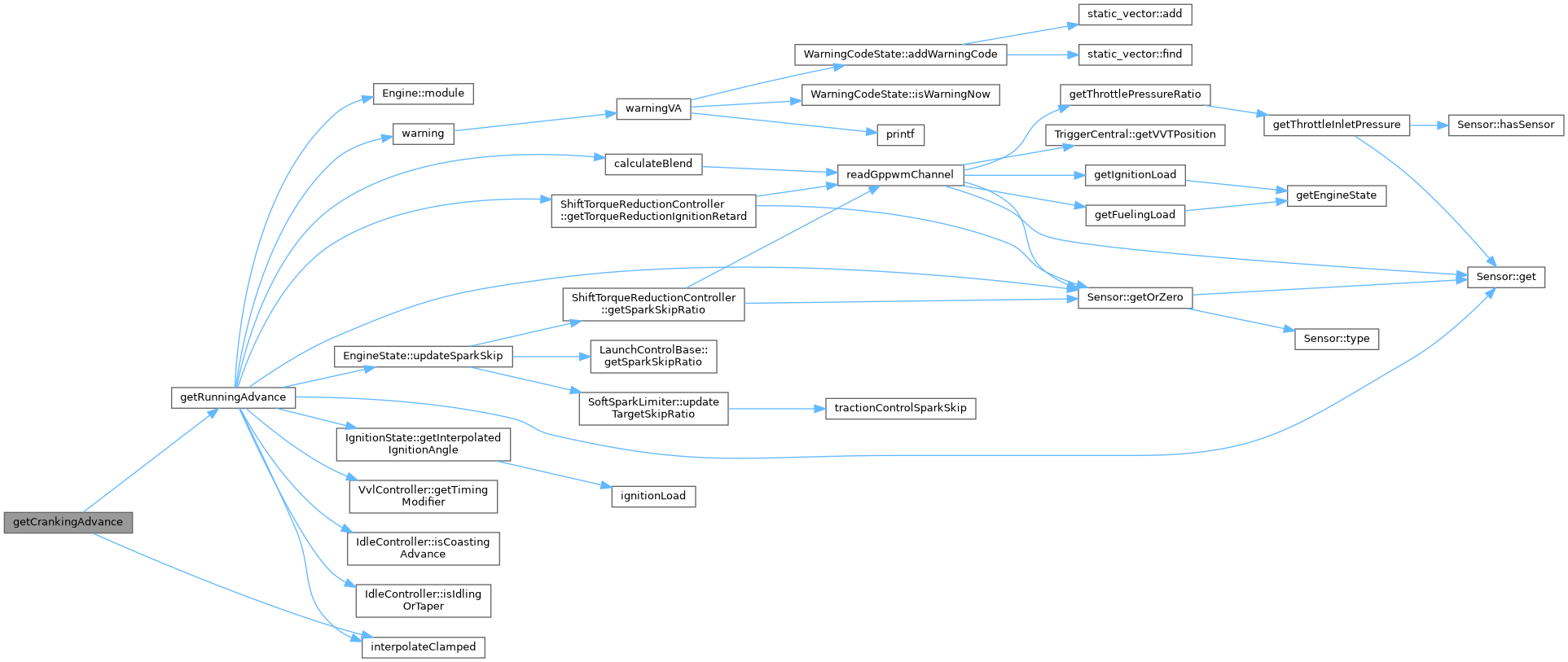
◆ getCrankingAdvance()
- Returns
- ignition timing angle advance before TDC for Cranking
Definition at line 198 of file ignition_state.cpp.
Referenced by IgnitionState::getAdvance().

◆ getCylinderIgnitionTrim()
| PUBLIC_API_WEAK_SOMETHING_WEIRD angle_t getCylinderIgnitionTrim | ( | size_t | cylinderNumber, |
| float | rpm, | ||
| float | ignitionLoad | ||
| ) |
Definition at line 257 of file ignition_state.cpp.
Referenced by EngineState::periodicFastCallback().


◆ getMultiSparkCount()
Definition at line 261 of file ignition_state.cpp.
Referenced by EngineState::periodicFastCallback().

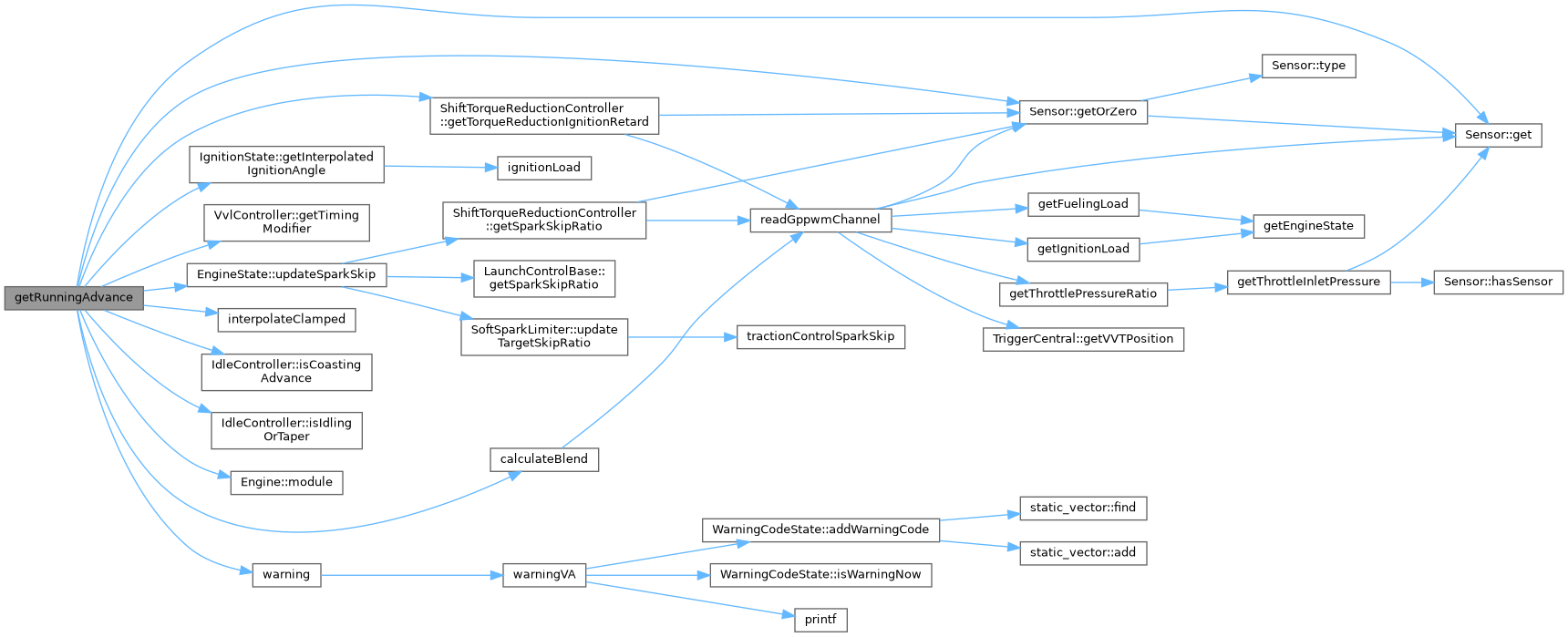
◆ getRunningAdvance()
- Returns
- ignition timing angle advance before TDC
Definition at line 37 of file ignition_state.cpp.
Referenced by IgnitionState::getAdvance(), and getCrankingAdvance().

◆ initIgnitionAdvanceControl()
| void initIgnitionAdvanceControl | ( | ) |
Definition at line 299 of file ignition_state.cpp.
Referenced by commonInitEngineController().

Variable Documentation
◆ tcSparkSkipTable
|
static |
Definition at line 30 of file ignition_state.cpp.
Referenced by getRunningAdvance(), and initIgnitionAdvanceControl().
◆ tcTimingDropTable
|
static |
Definition at line 29 of file ignition_state.cpp.
Referenced by getRunningAdvance(), and initIgnitionAdvanceControl().