Functions | |
| angle_t | getCylinderIgnitionTrim (size_t cylinderNumber, float rpm, float ignitionLoad) |
| float | getInitialAdvance (float rpm, float map, float advanceMax) |
| angle_t | getCrankingAdvance (float rpm, float engineLoad) |
| angle_t | getRunningAdvance (float rpm, float engineLoad) |
| angle_t | getAdvanceCorrections (float engineLoad) |
| size_t | getMultiSparkCount (float rpm) |
| void | initIgnitionAdvanceControl () |
Function Documentation
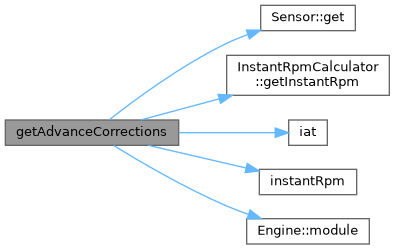
◆ getAdvanceCorrections()
Definition at line 164 of file ignition_state.cpp.
164 {
166
169 } else {
174 );
175 }
176
177#if EFI_IDLE_CONTROL
179
180 engine->ignitionState.timingPidCorrection = engine->module<IdleController>()->getIdleTimingAdjustment(instantRpm);
181#endif // EFI_IDLE_CONTROL
182
184
185#if EFI_TUNER_STUDIO
187#endif /* EFI_TUNER_STUDIO */
188
193}
Definition dfco.h:11
Definition idle_thread.h:56
float getInstantRpm() const
Definition instant_rpm_calculator.h:11
virtual SensorResult get() const =0
static CCM_OPTIONAL FunctionalSensor iat(SensorType::Iat, MS2NT(10))
@ Iat
instantRpm("sync: instant RPM", SensorCategory.SENSOR_INPUTS, FieldType.INT16, 326, 1.0, 0.0, 0.0, "rpm")
scaled_channel< int16_t, 100, 1 > dfcoTimingRetard
Definition ignition_state_generated.h:52
scaled_channel< int16_t, 100, 1 > timingPidCorrection
Definition ignition_state_generated.h:46
scaled_channel< int16_t, 100, 1 > cltTimingCorrection
Definition ignition_state_generated.h:34
scaled_channel< int16_t, 100, 1 > timingIatCorrection
Definition ignition_state_generated.h:40
uint8_t multiSparkCounter
Definition output_channels_generated.h:947
scaled_channel< int16_t, 10, 1 > ignitionIatCorrTable[IAT_IGN_CORR_LOAD_COUNT][IAT_IGN_CORR_TEMP_COUNT]
int8_t ignitionIatCorrTempBins[IAT_IGN_CORR_TEMP_COUNT]
scaled_channel< uint8_t, 1, 5 > ignitionIatCorrLoadBins[IAT_IGN_CORR_LOAD_COUNT]
Referenced by IgnitionState::getAdvance().
Here is the call graph for this function:
Here is the caller graph for this function:

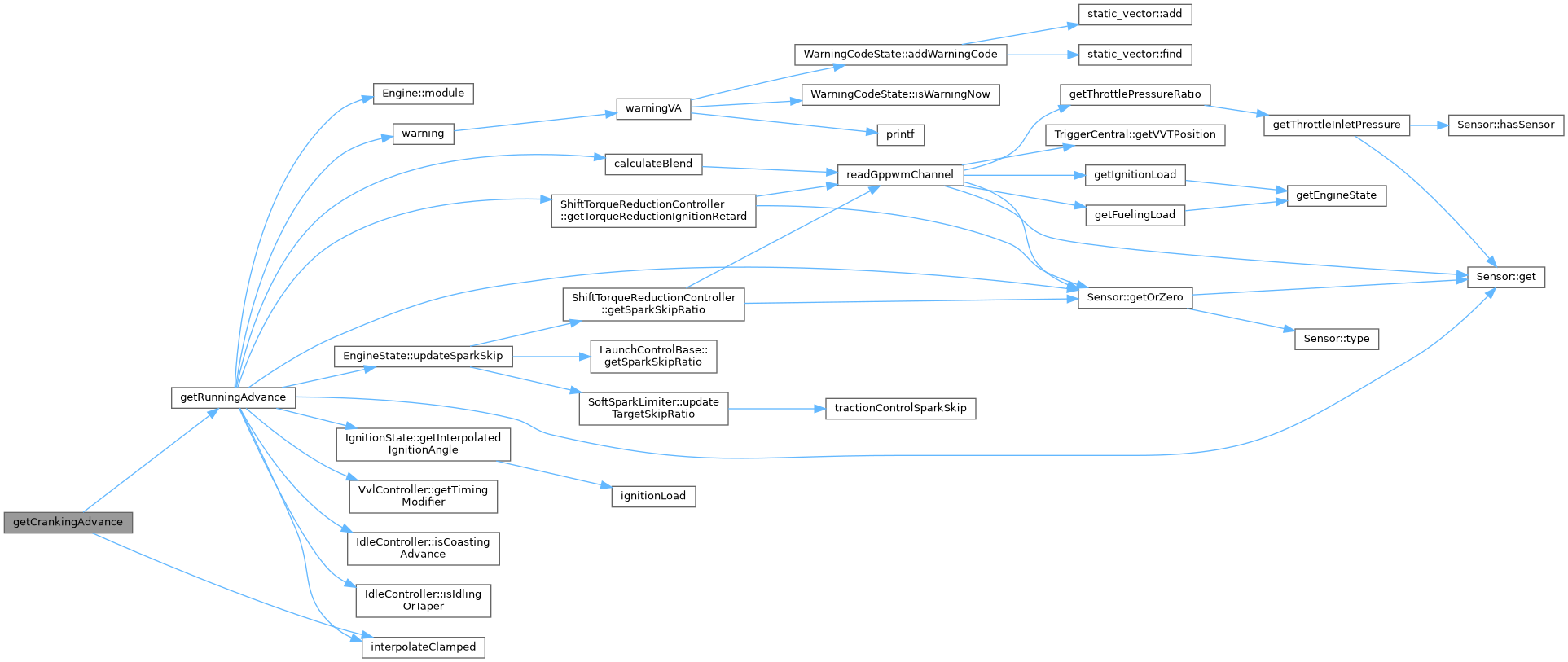
◆ getCrankingAdvance()
- Returns
- ignition timing angle advance before TDC for Cranking
Definition at line 198 of file ignition_state.cpp.
198 {
199 // get advance from the separate table for Cranking
202 }
203
204 // Interpolate the cranking timing angle to the earlier running angle for faster engine start
205 angle_t crankingToRunningTransitionAngle = getRunningAdvance(engineConfiguration->cranking.rpm, engineLoad);
206 // interpolate not from zero, but starting from min. possible rpm detected
207 return interpolateClamped(engine->rpmCalculator.getMinCrankingRpm(), engineConfiguration->crankingTimingAngle, engineConfiguration->cranking.rpm, crankingToRunningTransitionAngle, rpm);
208}
float interpolateClamped(float x1, float y1, float x2, float y2, float x)
Definition interpolation.cpp:69
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
angle_t getRunningAdvance(float rpm, float engineLoad)
Definition ignition_state.cpp:37
int16_t rpm
angle_t crankingTimingAngle
cranking_parameters_s cranking
bool useSeparateAdvanceForCranking
scaled_channel< int16_t, 100, 1 > crankingAdvance[CRANKING_ADVANCE_CURVE_SIZE]
uint16_t crankingAdvanceBins[CRANKING_ADVANCE_CURVE_SIZE]
Referenced by IgnitionState::getAdvance().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ getCylinderIgnitionTrim()
Definition at line 257 of file ignition_state.cpp.
257 {
259}
static angle_t getInterpolatedIgnitionTrim(size_t cylinderNumber, float rpm, float ignitionLoad)
Definition ignition_state.cpp:376
ignitionLoad("Ignition: load", SensorCategory.SENSOR_INPUTS, FieldType.INT, 1424, 1.0, -1.0, -1.0, "")
Referenced by EngineState::periodicFastCallback().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ getInitialAdvance()
this method is used to build default advance map
Definition at line 72 of file default_ignition.cpp.
72 {
73 map = std::min(map, 100.0f);
75
76 if (rpm >= 3000)
77 return round10(advance + 0.1 * (100 - map));
78 return round10(advance + 0.1 * (100 - map) * rpm / 3000);
79}
static float getAdvanceForRpm(float rpm, float advanceMax)
Definition default_ignition.cpp:58
Referenced by buildTimingMap().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ getMultiSparkCount()
Definition at line 261 of file ignition_state.cpp.
261 {
262 // Compute multispark (if enabled)
264 && rpm <= engineConfiguration->multisparkMaxRpm
266 // For zero RPM, disable multispark. We don't yet know the engine speed, so multispark may not be safe.
267 if (rpm == 0) {
268 return 0;
269 }
270
273
274 // dwell times are below 10 seconds here so we use 32 bit type for performance reasons
277
278 constexpr float usPerDegreeAt1Rpm = 60e6 / 360;
279 floatus_t usPerDegree = usPerDegreeAt1Rpm / rpm;
280
281 // How long is there for sparks? The user configured an angle, convert to time.
283 // How long does one spark take?
284 floatus_t oneSparkTime = multiDelay + multiDwell;
285
286 // How many sparks can we fit in the alloted time?
287 float sparksFitInTime = additionalSparksUs / oneSparkTime;
288
289 // Take the floor (convert to uint8_t) - we want to undershoot, not overshoot
290 uint32_t floored = sparksFitInTime;
291
292 // Allow no more than the maximum number of extra sparks
294 } else {
295 return 0;
296 }
297}
bool multisparkEnable
uint8_t multisparkMaxSparkingAngle
uint8_t multisparkMaxExtraSparkCount
scaled_channel< uint16_t, 1000, 1 > multisparkDwell
scaled_channel< uint16_t, 1000, 1 > multisparkSparkDuration
Referenced by EngineState::periodicFastCallback().
Here is the caller graph for this function:

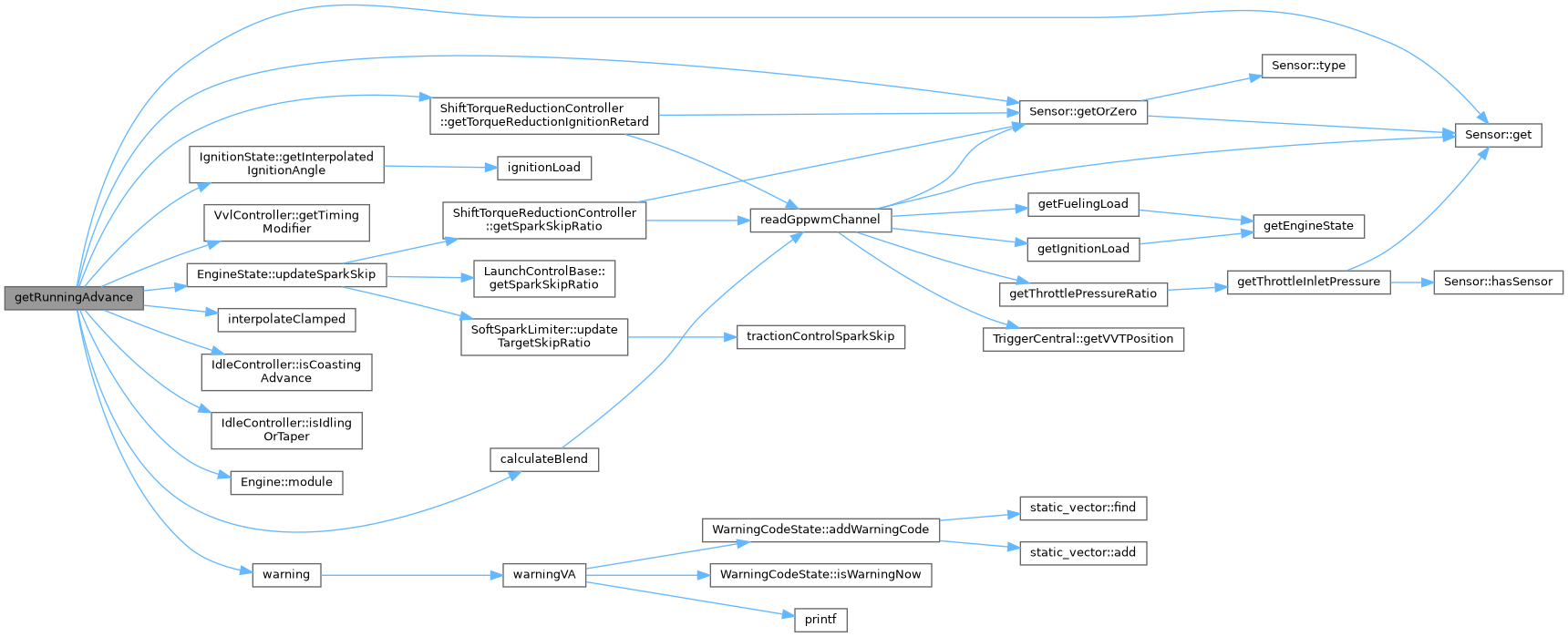
◆ getRunningAdvance()
- Returns
- ignition timing angle advance before TDC
Definition at line 37 of file ignition_state.cpp.
37 {
38 if (std::isnan(engineLoad)) {
40 return NAN;
41 }
42
44
45 // compute base ignition angle from main table
47
51 engine->engineState.tractionControlSparkSkip = tcSparkSkipTable.getValue(wheelSlip, vehicleSpeed);
53
55
56#if EFI_ANTILAG_SYSTEM
63 );
65 }
66#endif /* EFI_ANTILAG_SYSTEM */
67
68 // Add any adjustments if configured
71
76
77 advanceAngle += result.Value;
78 }
79
80 // get advance from the separate table for Idle
81#if EFI_IDLE_CONTROL
83 (engine->module<IdleController>()->isIdlingOrTaper() || engine->module<IdleController>()->isCoastingAdvance())) {
85
87 if (tps) {
88 // interpolate between idle table and normal (running) table using TPS threshold
89 // 0 TPS -> idle table
90 // 1/2 threshold -> idle table
91 // idle threshold -> normal table
93 advanceAngle = interpolateClamped(idleThreshold / 2, idleAdvance, idleThreshold, advanceAngle, tps.Value);
94 }
95 }
96#endif
97
98#if EFI_IDLE_CONTROL
99 // reset ignition table dot, see #8198
100 if(engineConfiguration->useSeparateAdvanceForIdle && engine->module<IdleController>()->isIdlingOrTaper()){
104 } else {
108 }
109#endif
110
111#if EFI_LAUNCH_CONTROL
118 if (smoothRetardStartRpm <= rpm) {
120 // https://github.com/rusefi/rusefi/issues/5611#issuecomment-2130431696
121 return interpolateClamped(smoothRetardStartRpm, advanceAngle, smoothRetardEndRpm, launchAngle, rpm);
122 } else {
123 return launchAngle;
124 }
125 }
127 return launchAngle;
128 }
129 }
132 ) {
134 }
135 if (engineConfiguration->nitrousControlEnabled && engine->module<NitrousController>()->isNitrousCondition) {
137 }
138#endif /* EFI_LAUNCH_CONTROL */
139
140#ifdef MODULE_VVL_CONTROLLER
142#endif /* MODULE_VVL_CONTROLLER */
143
144 return advanceAngle;
145}
ShiftTorqueReductionController shiftTorqueReductionController
Definition engine.h:225
static angle_t getInterpolatedIgnitionAngle(float rpm, float ignitionLoad)
Definition ignition_state.cpp:368
Definition nitrous_controller.h:9
float getTorqueReductionIgnitionRetard()
Definition shift_torque_reduction_controller.cpp:159
Definition vvl_controller.h:12
BlendResult calculateBlend(blend_table_s &cfg, float rpm, float load)
Definition engine_math.cpp:161
static Map3D< TRACTION_CONTROL_ETB_DROP_SLIP_SIZE, TRACTION_CONTROL_ETB_DROP_SPEED_SIZE, int8_t, uint16_t, uint8_t > tcTimingDropTable
Definition ignition_state.cpp:29
static Map3D< TRACTION_CONTROL_ETB_DROP_SLIP_SIZE, TRACTION_CONTROL_ETB_DROP_SPEED_SIZE, int8_t, uint16_t, uint8_t > tcSparkSkipTable
Definition ignition_state.cpp:30
@ CUSTOM_NAN_ENGINE_LOAD
@ CUSTOM_ERR_ASSERT
@ VehicleSpeed
@ DriverThrottleIntent
@ WheelSlipRatio
scaled_channel< int16_t, 100, 1 > timingALSCorrection
Definition antilag_system_state_generated.h:112
bool isAntilagCondition
Definition antilag_system_state_generated.h:10
float nitrousIgnitionRetard
bool launchSmoothRetard
bool launchControlEnabled
uint16_t launchCorrectionsEndRpm
bool enableLaunchRetard
bool nitrousControlEnabled
int launchRpmWindow
float launchTimingRetard
bool torqueReductionEnabled
bool useSeparateAdvanceForIdle
uint16_t launchRpm
int16_t idlePidDeactivationTpsThreshold
float tractionControlSparkSkip
Definition engine_state_generated.h:344
int16_t rpmForIgnitionTableDot
Definition ignition_state_generated.h:200
int16_t rpmForIgnitionIdleTableDot
Definition ignition_state_generated.h:204
scaled_channel< int16_t, 50, 1 > tractionAdvanceDrop
Definition ignition_state_generated.h:70
float loadForIgnitionTableDot
Definition ignition_state_generated.h:214
bool isLaunchCondition
Definition launch_control_state_generated.h:22
bool isPreLaunchCondition
Definition launch_control_state_generated.h:18
bool isNitrousCondition
Definition nitrous_control_state_generated.h:31
scaled_channel< int16_t, 100, 1 > ignBlendOutput[IGN_BLEND_COUNT]
Definition output_channels_generated.h:1031
scaled_channel< int16_t, 10, 1 > ignBlendParameter[IGN_BLEND_COUNT]
Definition output_channels_generated.h:1021
scaled_channel< uint8_t, 2, 1 > ignBlendBias[IGN_BLEND_COUNT]
Definition output_channels_generated.h:1026
scaled_channel< int16_t, 10, 1 > ignBlendYAxis[IGN_BLEND_COUNT]
Definition output_channels_generated.h:1035
blend_table_s ignBlends[IGN_BLEND_COUNT]
uint16_t alsIgnRetardLoadBins[ALS_SIZE]
float idleAdvance[IDLE_ADVANCE_CURVE_SIZE]
scaled_channel< int16_t, 10, 1 > ALSTimingRetardTable[ALS_SIZE][ALS_RPM_SIZE]
uint16_t alsIgnRetardrpmBins[ALS_RPM_SIZE]
scaled_channel< uint8_t, 1, 50 > idleAdvanceBins[IDLE_ADVANCE_CURVE_SIZE]
bool isFlatShiftConditionSatisfied
Definition shift_torque_reduction_state_generated.h:25
Referenced by IgnitionState::getAdvance(), and getCrankingAdvance().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ initIgnitionAdvanceControl()
| void initIgnitionAdvanceControl | ( | ) |
Definition at line 299 of file ignition_state.cpp.
299 {
300 tcTimingDropTable.initTable(engineConfiguration->tractionControlTimingDrop, engineConfiguration->tractionControlSlipBins, engineConfiguration->tractionControlSpeedBins);
301 tcSparkSkipTable.initTable(engineConfiguration->tractionControlIgnitionSkip, engineConfiguration->tractionControlSlipBins, engineConfiguration->tractionControlSpeedBins);
302}
uint8_t tractionControlSpeedBins[TRACTION_CONTROL_ETB_DROP_SPEED_SIZE]
int8_t tractionControlTimingDrop[TRACTION_CONTROL_ETB_DROP_SPEED_SIZE][TRACTION_CONTROL_ETB_DROP_SLIP_SIZE]
scaled_channel< uint16_t, 100, 1 > tractionControlSlipBins[TRACTION_CONTROL_ETB_DROP_SLIP_SIZE]
int8_t tractionControlIgnitionSkip[TRACTION_CONTROL_ETB_DROP_SPEED_SIZE][TRACTION_CONTROL_ETB_DROP_SLIP_SIZE]
Referenced by commonInitEngineController().
Here is the caller graph for this function:
